SG.hu·
LiDAR-egységek kerülhetnek a jövőbeli Volvókba

Az autógyártó biztonságosabbá tenné az autonóm közlekedést.
A Volvo szeretné a gépkocsijai következő generációját olyan autonóm vezetési funkciókkal ellátni, amelyek a Light Detection and Ranging (LiDAR) rendszereknek köszönhetően áttekintést tudnak szerezni a közvetlen környezetükről. A konszern ezért a korábbinál szorosabb együttműködést alakít ki a Luminar nevű startuppal, amelynek a LiDAR egységeit használja a valós idejű objektum- és akadályfelismeréshez.
A Luminar azután vált igazán ismertté, hogy továbbfejlesztette a LiDAR rendszert. A vállalat lézeres érzékelője már 200 méteres távolságból azonosítja a dolgokat. Ennek köszönhetően egy az autópályán önállóan közlekedő járműnek az eddigi 1 vagy 2 másodperc helyett 7 másodperc ideje van arra, hogy reagáljon az esetleg felbukkanó akadályokra és jobban felismerje a sötét objektumokat is. A Volvo már 2018 júniusában befektetett a cégbe.
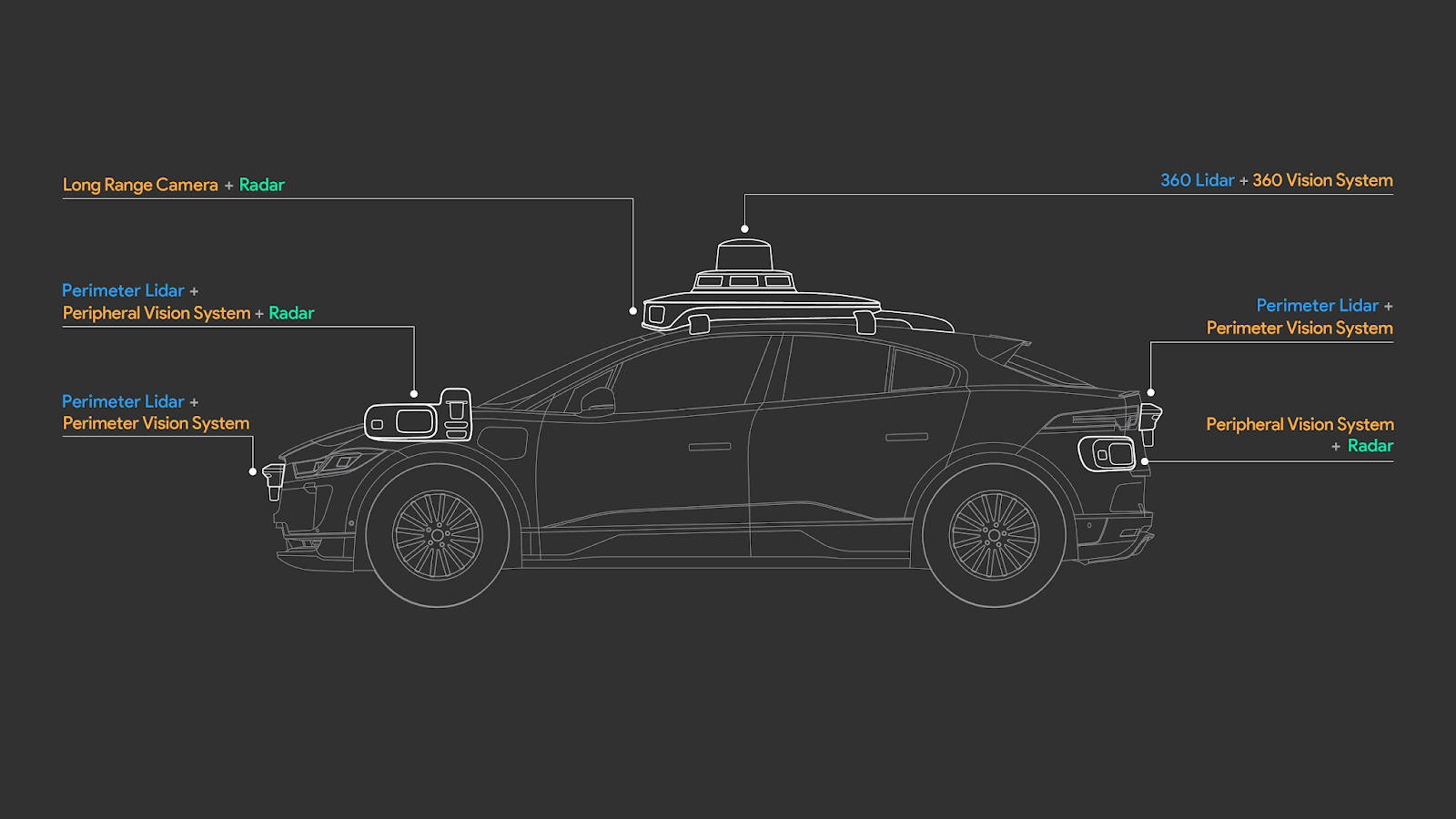
A Volvo hosszú távú célja az, hogy az általa kifejlesztett modellek ne csupán a LiDAR rendszert használják, hanem kamerákat és radarokat is. A társaság 2022 után minden új modelljét fel akarja szerelni a technikával. A szenzorokat a gépkocsik tetejébe fogják integrálni, közvetlenül a szélvédők fölötti részbe és az az elképzelés, hogy a járművek legalább az autópályákon közlekedjenek önállóan. Ehhez ugyanakkor az is szükséges, hogy módosítsák a törvényi előírásokat. Az egyelőre tisztázatlan, hogy mennyire lehet automatizálni az autópályás közlekedést és vajon az egyes modellek képesek lesznek-e például önállóan sávot váltani vagy akár egy csomóponton is áthaladni. A Volvo csak annyit közölt, hogy a gépkocsik szoftverét frissíteni lehet majd, így azok folyamatosan új funkciókkal bővülhetnek.
Henrik Green, a Volvo műszaki vezetője kiemelte, hogy az autonóm közlekedés sok emberéletet megmenthet, ha felelősségteljes és biztonságos módon vezetik be.
A Volvo szeretné a gépkocsijai következő generációját olyan autonóm vezetési funkciókkal ellátni, amelyek a Light Detection and Ranging (LiDAR) rendszereknek köszönhetően áttekintést tudnak szerezni a közvetlen környezetükről. A konszern ezért a korábbinál szorosabb együttműködést alakít ki a Luminar nevű startuppal, amelynek a LiDAR egységeit használja a valós idejű objektum- és akadályfelismeréshez.
A Luminar azután vált igazán ismertté, hogy továbbfejlesztette a LiDAR rendszert. A vállalat lézeres érzékelője már 200 méteres távolságból azonosítja a dolgokat. Ennek köszönhetően egy az autópályán önállóan közlekedő járműnek az eddigi 1 vagy 2 másodperc helyett 7 másodperc ideje van arra, hogy reagáljon az esetleg felbukkanó akadályokra és jobban felismerje a sötét objektumokat is. A Volvo már 2018 júniusában befektetett a cégbe.
A Volvo hosszú távú célja az, hogy az általa kifejlesztett modellek ne csupán a LiDAR rendszert használják, hanem kamerákat és radarokat is. A társaság 2022 után minden új modelljét fel akarja szerelni a technikával. A szenzorokat a gépkocsik tetejébe fogják integrálni, közvetlenül a szélvédők fölötti részbe és az az elképzelés, hogy a járművek legalább az autópályákon közlekedjenek önállóan. Ehhez ugyanakkor az is szükséges, hogy módosítsák a törvényi előírásokat. Az egyelőre tisztázatlan, hogy mennyire lehet automatizálni az autópályás közlekedést és vajon az egyes modellek képesek lesznek-e például önállóan sávot váltani vagy akár egy csomóponton is áthaladni. A Volvo csak annyit közölt, hogy a gépkocsik szoftverét frissíteni lehet majd, így azok folyamatosan új funkciókkal bővülhetnek.
Henrik Green, a Volvo műszaki vezetője kiemelte, hogy az autonóm közlekedés sok emberéletet megmenthet, ha felelősségteljes és biztonságos módon vezetik be.