LiDAR-egységek kerülhetnek a jövőbeli Volvókba
Jelentkezz be a hozzászóláshoz.

#9
Arra lennék kíváncsi, hogy rakják össze a sok szenzor adatait egy egésszé.
https://www.youtube.com/shorts/zECTF2H8Jp8
#8
"ott van a videóban"
Ha lenne annyi eszed akkor megértenéd hogy már maga a video sem a LIDAR része, ez egy vizualizációs szoftver eredménye, valójában az önvezetéshez nem is szükséges, ez a fejlesztőknek jó hogy saját optikai szenzoraikkal (szemükkel) lássák az adathalmazt.
"És igen, a szerint 2mp késleltetés"
Konkrét példát adj. Teljesen életszerűtlen hogy egy n*10Hz es adatforrás és egy processzor amit az adatmennyiség sokszorosának feldogozási kapaciátásával rendelekzik, ekkora késletetéssel állítani elő az adatot. Mit csinál 2mp-ig? Egy kamerából jövő optikai információ feldolgozása sokkal számításigényesebb sokkal jobban támaszkodik a korábbi frame-ek információjára hogy legyen mélységi modellje, a LIDAR nagy előnye éppen az hogy egy frame-en belül ad képet minden pixelhez tartozó mélységi információkkal, számolni sem kell hozzá, sokkal egyszerűbb szoftveres réteg elégséges a modell felhúzásához.
"Én-e mondtam tán? "
Igen, mondtad, ilyenekből állt kb. a HSZ-od fele: "azaz az objektumot NEM ismeri fel."
"Neménmondtam ezt a fergeteges baromságot ... ugye"
Én arról mondtam hogy fergeteg baromság amit te állítasz, nem a cikkről.
"NEM. Sem a felbontása, sem a funkcionalitása nem képes rá"
Megint nem érted a fizika működését. A lézer valójában fény akkor is ha a számunkra nem látható hullámhossz tartományban van(bár annak a közelében), máshogy verődik vissza egy elnyelődő mint egy jól reflektáló felületről, a fekete aszfalt elég jól elnyeli, míg a fehér reflektálós festékkel festett útburkolati jel elég jól visszaveri.

"Ez egy TÁVOLSÁGMÉRŐ"
Attól hogy nagy betűvel írod attól még hülyeség. A sima távolságmérővel szemben az pontos irány koordinátákat is biztosít a távolság információk mellé. Egy 3D-s scannelési eredményhalmazt ad, a sima kézi távolságmérő 1D-s 1 darab információjával szemben. A te buta logikád szerint a kamerát egyébként ilyen alapon hívhatjuk fényérzékelőnek is, aminek a funkcionalitása nem alkalmas semminek a felismerésére sem.
"Amely rendszerben 1 Lidar többe kerül, mint az összes többi nem"
Az ár már nem technológiai kérdés, egyébként a sok 10.000 dolárról már az 1000 $-os szintre került. Ez miden újdonsággal így van ami csak kis szériában létezik, a fejlesztés és a tömegtermelés villámgyorsan képes leszorítani az árat.
"több értelme lenne."
Szerinted, az autót tervező mérnökök többsége szerint nem. Na vajon ki ért hozzá jobban?
Ha lenne annyi eszed akkor megértenéd hogy már maga a video sem a LIDAR része, ez egy vizualizációs szoftver eredménye, valójában az önvezetéshez nem is szükséges, ez a fejlesztőknek jó hogy saját optikai szenzoraikkal (szemükkel) lássák az adathalmazt.
"És igen, a szerint 2mp késleltetés"
Konkrét példát adj. Teljesen életszerűtlen hogy egy n*10Hz es adatforrás és egy processzor amit az adatmennyiség sokszorosának feldogozási kapaciátásával rendelekzik, ekkora késletetéssel állítani elő az adatot. Mit csinál 2mp-ig? Egy kamerából jövő optikai információ feldolgozása sokkal számításigényesebb sokkal jobban támaszkodik a korábbi frame-ek információjára hogy legyen mélységi modellje, a LIDAR nagy előnye éppen az hogy egy frame-en belül ad képet minden pixelhez tartozó mélységi információkkal, számolni sem kell hozzá, sokkal egyszerűbb szoftveres réteg elégséges a modell felhúzásához.
"Én-e mondtam tán? "
Igen, mondtad, ilyenekből állt kb. a HSZ-od fele: "azaz az objektumot NEM ismeri fel."
"Neménmondtam ezt a fergeteges baromságot ... ugye"
Én arról mondtam hogy fergeteg baromság amit te állítasz, nem a cikkről.
"NEM. Sem a felbontása, sem a funkcionalitása nem képes rá"
Megint nem érted a fizika működését. A lézer valójában fény akkor is ha a számunkra nem látható hullámhossz tartományban van(bár annak a közelében), máshogy verődik vissza egy elnyelődő mint egy jól reflektáló felületről, a fekete aszfalt elég jól elnyeli, míg a fehér reflektálós festékkel festett útburkolati jel elég jól visszaveri.
Spoiler (katt a megjelenítéshez)
"Ez egy TÁVOLSÁGMÉRŐ"
Attól hogy nagy betűvel írod attól még hülyeség. A sima távolságmérővel szemben az pontos irány koordinátákat is biztosít a távolság információk mellé. Egy 3D-s scannelési eredményhalmazt ad, a sima kézi távolságmérő 1D-s 1 darab információjával szemben. A te buta logikád szerint a kamerát egyébként ilyen alapon hívhatjuk fényérzékelőnek is, aminek a funkcionalitása nem alkalmas semminek a felismerésére sem.
"Amely rendszerben 1 Lidar többe kerül, mint az összes többi nem"
Az ár már nem technológiai kérdés, egyébként a sok 10.000 dolárról már az 1000 $-os szintre került. Ez miden újdonsággal így van ami csak kis szériában létezik, a fejlesztés és a tömegtermelés villámgyorsan képes leszorítani az árat.
"több értelme lenne."
Szerinted, az autót tervező mérnökök többsége szerint nem. Na vajon ki ért hozzá jobban?

#7
Ha nem lennél lusta, te is meg tudnád nézni képkockánkét ... ott van a videóban (2 helyen is).
És igen, a szerint 2mp késleltetés van a Lidar által kirajzolt "táj" és a szélvédőn át látott között.
" LIDAR nem ismer fel semmit"
Én-e mondtam tán? Vagy a cikkben van-e benne?
"A vállalat lézeres érzékelője már 200 méteres távolságból azonosítja a dolgokat ... és jobban felismerje a sötét objektumokat is. "
Neménmondtam ezt a fergeteges baromságot ... ugye
"Bár a LIDAR információ alapján útburkalti jelek vagy táblákon lévő szöveg is megkülönböztethető"
NEM. Sem a felbontása, sem a funkcionalitása nem képes rá. Ez egy TÁVOLSÁGMÉRŐ. És ezt felesleges is tovább magyarázni is.
"Egyébként senki nem olyan hülye hogy a LIDAR-ból önmagában akarjon önvezetést fabrikálni, több lidar, radar és kamerát együttessen használnak."
Amely rendszerben 1 Lidar többe kerül, mint az összes többi nem Lidar szenzor és kamera együttesen.
Inkább tennének bele még 5-10 kamerát akkor ... több értelme lenne.
És hogy még viccesebb legyen, a Vovóó ugyebár egy szűk sávon előre néző Lidart tesz be dizájnosan ablak fölé.
Na annak mennyi az értelme? -1 ?
És igen, a szerint 2mp késleltetés van a Lidar által kirajzolt "táj" és a szélvédőn át látott között.
" LIDAR nem ismer fel semmit"
Én-e mondtam tán? Vagy a cikkben van-e benne?
"A vállalat lézeres érzékelője már 200 méteres távolságból azonosítja a dolgokat ... és jobban felismerje a sötét objektumokat is. "
Neménmondtam ezt a fergeteges baromságot ... ugye
"Bár a LIDAR információ alapján útburkalti jelek vagy táblákon lévő szöveg is megkülönböztethető"
NEM. Sem a felbontása, sem a funkcionalitása nem képes rá. Ez egy TÁVOLSÁGMÉRŐ. És ezt felesleges is tovább magyarázni is.
"Egyébként senki nem olyan hülye hogy a LIDAR-ból önmagában akarjon önvezetést fabrikálni, több lidar, radar és kamerát együttessen használnak."
Amely rendszerben 1 Lidar többe kerül, mint az összes többi nem Lidar szenzor és kamera együttesen.
Inkább tennének bele még 5-10 kamerát akkor ... több értelme lenne.
És hogy még viccesebb legyen, a Vovóó ugyebár egy szűk sávon előre néző Lidart tesz be dizájnosan ablak fölé.
Na annak mennyi az értelme? -1 ?
Star Trek fan vagyok, tehát egy IDEALISTA. Viszont magyar is vagyok, tehát egy HARDCORE REALISTA.
#6
A LIDAR nem ismer fel semmit, csak alapadatokat szolgáltat a szofveres feldolgozó számára, kb. 10-30Hz frekvenciával, úgyhogy a te késleltés adatot teljesen életszerűtlen. A 200m az szerintem is nagyon idealizált szituáció, onnan már nagyon kevés 'pixel' érkezik egy normál autó tetejei setupban. LIDAR visualziation video. Bár a LIDAR információ alapján útburkalti jelek vagy táblákon lévő szöveg is megkülönböztethető, az alapvetően nem ennek a rétegnek a feladata, hanem optikai felismerésnek, arra viszont alkamas hogy 'jelezze' hogy az ott egy tábla jellegű objektum, érdemes a kép tartalmát eként értelmezni. Egyébként senki nem olyan hülye hogy a LIDAR-ból önmagában akarjon önvezetést fabrikálni, több lidar, radar és kamerát együttessen használnak.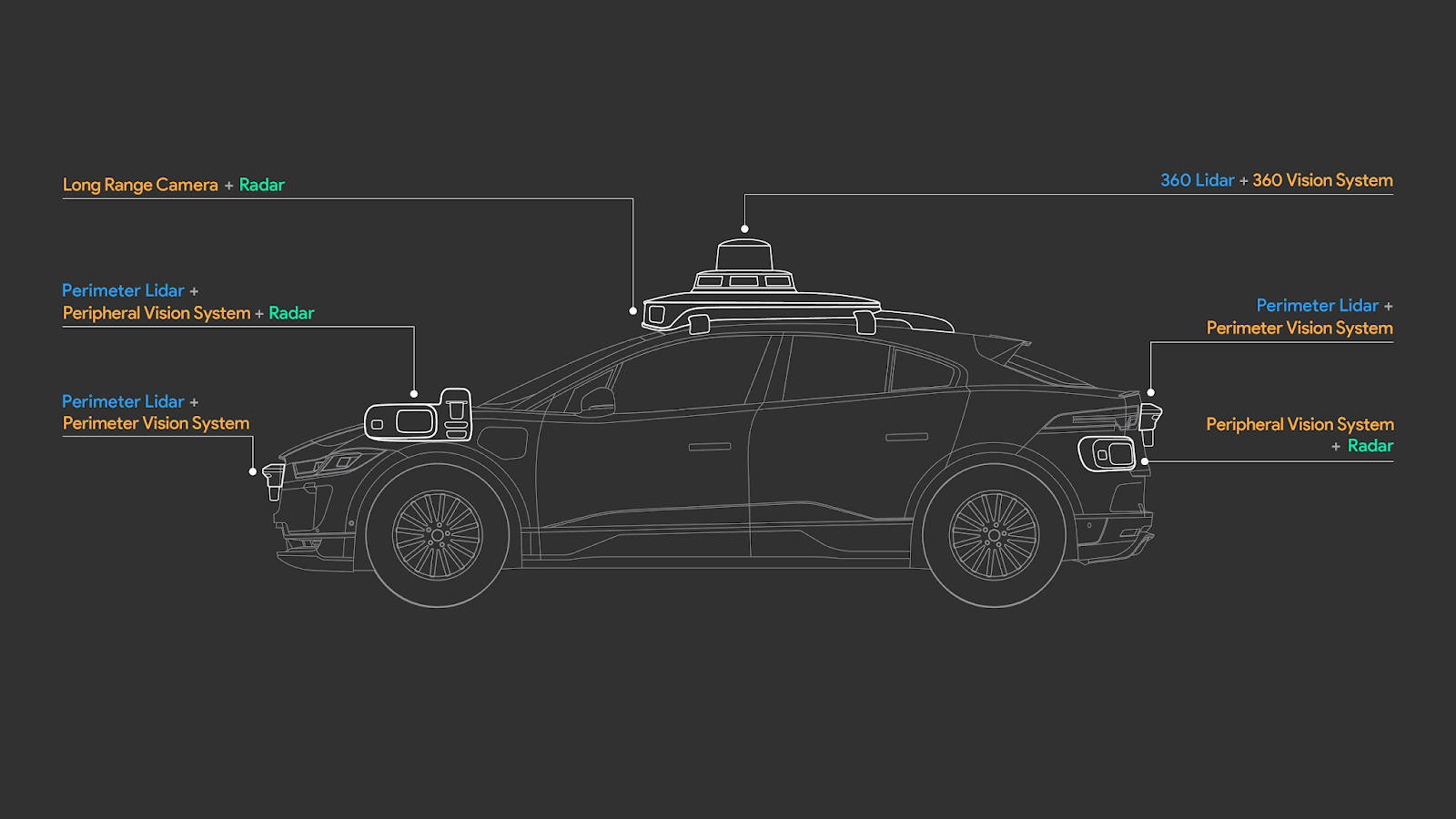
Spoiler (katt a megjelenítéshez)
#5
Tudom, tudom. Nem sok olyan ember van aki kikockázza a Lidar képét, összevetve a szélvédőn át látott tájjal ... pedig érdemes.
Az talán a legkisebb gond, hogy kb 2 mp késésben van a Lidar képe.
Aham, valós idejű ... a 250m "előrelátásból" 70m autópálya tempónál csak maga a késleltetés, és a feldolgozás még csak ezt követi.
Az nagyobb gond, hogy még a kanyarodó utat se "látja"
Azaz hogy az a tábla a kocsi előtt áll-e az úttesten, vagy az út szélén, neki rejtély.
És végül "objektum- és akadályfelismeréshez" ugye használhatatlan.
Annyit tud, hogy van ott valami. A távolságát, azt precízen megmondja, ERRE VALÓ.
De hogy az objektum-e, akadály-e ... hogy egy lufi vagy egy kamion ... na ehhez köze sincs, azaz az objektumot NEM ismeri fel.
Igen, táblát se, de még az alakját se, nemhogy mi van rajta.
Hány éve is jött ki az első "önvezető" Tesla ... Volvo bakker, ez SZÁNALMAS !
Az talán a legkisebb gond, hogy kb 2 mp késésben van a Lidar képe.
Aham, valós idejű ... a 250m "előrelátásból" 70m autópálya tempónál csak maga a késleltetés, és a feldolgozás még csak ezt követi.
Az nagyobb gond, hogy még a kanyarodó utat se "látja"
Azaz hogy az a tábla a kocsi előtt áll-e az úttesten, vagy az út szélén, neki rejtély.
És végül "objektum- és akadályfelismeréshez" ugye használhatatlan.
Annyit tud, hogy van ott valami. A távolságát, azt precízen megmondja, ERRE VALÓ.
De hogy az objektum-e, akadály-e ... hogy egy lufi vagy egy kamion ... na ehhez köze sincs, azaz az objektumot NEM ismeri fel.
Igen, táblát se, de még az alakját se, nemhogy mi van rajta.
Hány éve is jött ki az első "önvezető" Tesla ... Volvo bakker, ez SZÁNALMAS !
Star Trek fan vagyok, tehát egy IDEALISTA. Viszont magyar is vagyok, tehát egy HARDCORE REALISTA.
#4
Ilyen hozzáállással ma is max. a prérin lovagolnánk.
#3
Jelenleg milliok halnak meg es tizmilliok serulnek meg evente, ugyhogy par szaz ember nem rontana a helyzeten erdemben. Valosagban autopalyan, mar legkezdetlegesebb vezetesi rendszerek is jobbak lennenek az embernel.
#2
faszság

#1
ja...de addig párszázan belehalnak majd
Olyan nincs, hogy valami nem sörnyitó...