SG.hu·
Gyors és fordulékony egy új robothal
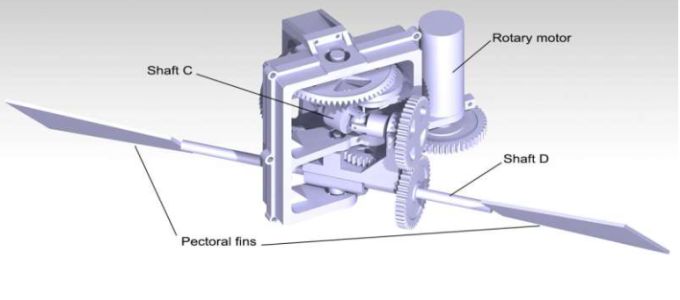
A gép nagyon hatékonyan használja az úszóit.
Az Universita Politecnica delle Marche kutatói egy olyan víz alatti robotot fejlesztettek ki, amelyet régészek és más tudósok a víz alatti környezetek távolból való felderítésére használhatnak. A robot megalkotásához a szakemberek egyike, Daniele Costa kifejezetten olyan halak technikáit tanulmányozta, amelyek a mellúszóik segítségével haladnak előre. A kutató kiemelte, hogy a halak meghajtási technikája sokkal fejlettebb, mint a jelenlegi műszaki megoldások.
Costa ötlete a disszertációja lezárása után jött. Miután azok a rendszerek, amelyeken jelenleg dolgozik, csak korlátozottan voltak manőverezőképesek, így úgy döntött, hogy David Scaradozzi technikussal együtt egy olyan meghajtási rendszert készít, amely egy robotot a halak fordulékonyságával ruház fel. Amennyiben egy gép a mellúszóit egymással ellentétes irányba mozgatja, akkor akár helyben meg is tud fordulni. Ez a mechanizmus hasonlít arra, amely számos víz alatt vadászó tengeri állatnál is megfigyelhető.

Az eddigi robothalaknak az úszóik működtetéséhez négy motorra volt szükségük, Costáék modelljének csupán egyre. A tesztek során a gép a víz alatt gyorsabb, fordulékonyabb, megbízhatóbb és robusztusabb volt, mint minden más hasonló jármű. További különbség, hogy a víz alatti járművek általában propellereket alkalmaznak, de a tengeri környezetben olyan eszközök kellenek, amelyek ötvözik a manőverezőképességet és a nagy utazósebességet. Erre a propellert használó járművek nem képesek.
Szintén eltérés, hogy a legtöbb víz alatti robot csak a hosszánál nagyobb sugarú körön belül tud irányt változtatni. Amennyiben a manőverezőképességen további propellerekkel javítanak, akkor viszont az ellenállás nő, amely pedig az utazósebességet csökkenti le. Az új gép ezzel szemben a hosszával megegyező sugarú körön belül is irányt tud változtatni.
Az Universita Politecnica delle Marche kutatói egy olyan víz alatti robotot fejlesztettek ki, amelyet régészek és más tudósok a víz alatti környezetek távolból való felderítésére használhatnak. A robot megalkotásához a szakemberek egyike, Daniele Costa kifejezetten olyan halak technikáit tanulmányozta, amelyek a mellúszóik segítségével haladnak előre. A kutató kiemelte, hogy a halak meghajtási technikája sokkal fejlettebb, mint a jelenlegi műszaki megoldások.
Costa ötlete a disszertációja lezárása után jött. Miután azok a rendszerek, amelyeken jelenleg dolgozik, csak korlátozottan voltak manőverezőképesek, így úgy döntött, hogy David Scaradozzi technikussal együtt egy olyan meghajtási rendszert készít, amely egy robotot a halak fordulékonyságával ruház fel. Amennyiben egy gép a mellúszóit egymással ellentétes irányba mozgatja, akkor akár helyben meg is tud fordulni. Ez a mechanizmus hasonlít arra, amely számos víz alatt vadászó tengeri állatnál is megfigyelhető.
Az eddigi robothalaknak az úszóik működtetéséhez négy motorra volt szükségük, Costáék modelljének csupán egyre. A tesztek során a gép a víz alatt gyorsabb, fordulékonyabb, megbízhatóbb és robusztusabb volt, mint minden más hasonló jármű. További különbség, hogy a víz alatti járművek általában propellereket alkalmaznak, de a tengeri környezetben olyan eszközök kellenek, amelyek ötvözik a manőverezőképességet és a nagy utazósebességet. Erre a propellert használó járművek nem képesek.
Szintén eltérés, hogy a legtöbb víz alatti robot csak a hosszánál nagyobb sugarú körön belül tud irányt változtatni. Amennyiben a manőverezőképességen további propellerekkel javítanak, akkor viszont az ellenállás nő, amely pedig az utazósebességet csökkenti le. Az új gép ezzel szemben a hosszával megegyező sugarú körön belül is irányt tud változtatni.