SG.hu·
Az önvezető autók leginkább szürkületben buknak meg

Egy több, mint 2000 önvezető jármű adatai alapján készült tanulmány szerint az ilyen autók bizonyos körülmények között biztonságosabbak lehetnek az emberek által vezetetteknél, míg más körülmények között potenciálisan veszélyesebbek. A kutatók elmondták, hogy munkájukban a korábbi tanulmányokhoz képest több adatot használtak fel mind az autonóm, mind az ember által vezetett járművekről.
A Nature Communications című szaklapban megjelent tanulmány célja az autonóm járművek és az ember vezette járművek közötti baleseti kockázati különbségek feltárása volt, hogy ezzel tájékoztatást nyújtson az autonóm technológia jövőbeli fejlesztéséhez és a biztonság fokozásához. A tanulmány 2100 autonóm jármű és 35 133 ember által vezetett jármű 2016 és 2022 közötti baleseteinek adatait gyűjtötte össze.
A Shengxuan Ding, a Közép-Floridai Egyetem doktorandusza által vezetett tanulmány megállapította, hogy az autonóm járművek valószínűleg javíthatják a közúti biztonságot, de vannak olyan területek is, amelyeken még javítani kell. Az eredmények szerint az autonóm járművek az embereknél kisebb valószínűséggel részesei olyan közúti eseményeknek, ahol egy baleset oka olyan mindennapi helyzet, mint például a forgalom áramlásával való sebességtartás hiánya vagy a sávból való kitérés. Megállapítása szerint az önvezető autók hatékonyabban kerülik el a hátulról és az oldalról történő ütközést, amelyek 0,5-szer, illetve 0,2-szer ritkábban fordulnak elő.
A kutatás szerint az önvezető járművek átlagosan 5,25-ször nagyobb valószínűséggel szenvedtek balesetet gyenge fényviszonyok között - kora reggel vagy szürkületkor, amikor a fény már fogyatkozik. Emellett 1,98-szor nagyobb valószínűséggel hibáztak kanyarodás közben, mint az emberek. Az autonóm járművek gyenge teljesítménye rossz fényviszonyok között "az összetett vezetési forgatókönyveknél elvárt helyzetfelismerés hiányának és a korlátozott vezetési tapasztalatnak" tulajdonítható. Az autonóm járművek ilyen körülmények közötti teljesítményének javítása "fejlett érzékelőket, robusztus algoritmusokat és intelligens tervezési megfontolásokat" igényelhet.
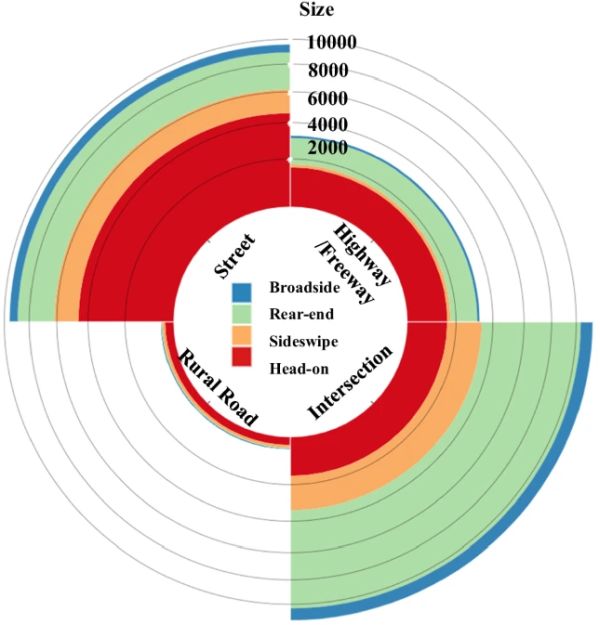
A baleseteket helyük és az ütközés pozíciója alapján csoportosították - a legtöbb egy kereszteződésben, hátulról történt
A tanulmány szerint az autonóm járművek által használt érzékelők és kamerák nem képesek gyorsan alkalmazkodni a fényviszonyok változásaihoz, ami befolyásolhatja az akadályok, gyalogosok és más járművek észlelési képességét. Hajnalban és szürkületkor például a nap árnyékai és visszaverődései megzavarhatják az érzékelőket, megnehezítve a tárgyak megkülönböztetését és a potenciális veszélyek azonosítását. Továbbá az ingadozó fényviszonyok befolyásolhatják a járművek által használt objektumérő és -felismerő algoritmusok pontosságát.
"A kulcsfontosságú tényezők közé tartozik az időjárás- és fényérzékelők fejlesztése, redundáns intézkedések végrehajtása és az érzékelőadatok hatékony integrálása. Ezekre a szempontokra összpontosítva az autonóm vezetési rendszerek biztonsága jelentősen javítható a kihívást jelentő helyzeteknél" - áll a kutatásban.
Itt meg kell jegyezni, hogy a tanulmány 2022-ig terjedő adatokra vonatkozik. Az elmúlt két évben a Google tulajdonában lévő Waymo által üzemeltetett autonóm sofőr nélküli taxik egyre több embert szállítottak, és éjjel-nappal közlekednek. Nem tökéletesek és csak néhány városra korlátozódnak, de az biztos, hogy az elmúlt mintegy 24 hónapban legalább némi fejlődés tapasztalható, és a befektetők nagy téteket tettek rájuk.
A Nature Communications című szaklapban megjelent tanulmány célja az autonóm járművek és az ember vezette járművek közötti baleseti kockázati különbségek feltárása volt, hogy ezzel tájékoztatást nyújtson az autonóm technológia jövőbeli fejlesztéséhez és a biztonság fokozásához. A tanulmány 2100 autonóm jármű és 35 133 ember által vezetett jármű 2016 és 2022 közötti baleseteinek adatait gyűjtötte össze.
A Shengxuan Ding, a Közép-Floridai Egyetem doktorandusza által vezetett tanulmány megállapította, hogy az autonóm járművek valószínűleg javíthatják a közúti biztonságot, de vannak olyan területek is, amelyeken még javítani kell. Az eredmények szerint az autonóm járművek az embereknél kisebb valószínűséggel részesei olyan közúti eseményeknek, ahol egy baleset oka olyan mindennapi helyzet, mint például a forgalom áramlásával való sebességtartás hiánya vagy a sávból való kitérés. Megállapítása szerint az önvezető autók hatékonyabban kerülik el a hátulról és az oldalról történő ütközést, amelyek 0,5-szer, illetve 0,2-szer ritkábban fordulnak elő.
A kutatás szerint az önvezető járművek átlagosan 5,25-ször nagyobb valószínűséggel szenvedtek balesetet gyenge fényviszonyok között - kora reggel vagy szürkületkor, amikor a fény már fogyatkozik. Emellett 1,98-szor nagyobb valószínűséggel hibáztak kanyarodás közben, mint az emberek. Az autonóm járművek gyenge teljesítménye rossz fényviszonyok között "az összetett vezetési forgatókönyveknél elvárt helyzetfelismerés hiányának és a korlátozott vezetési tapasztalatnak" tulajdonítható. Az autonóm járművek ilyen körülmények közötti teljesítményének javítása "fejlett érzékelőket, robusztus algoritmusokat és intelligens tervezési megfontolásokat" igényelhet.
A baleseteket helyük és az ütközés pozíciója alapján csoportosították - a legtöbb egy kereszteződésben, hátulról történt
A tanulmány szerint az autonóm járművek által használt érzékelők és kamerák nem képesek gyorsan alkalmazkodni a fényviszonyok változásaihoz, ami befolyásolhatja az akadályok, gyalogosok és más járművek észlelési képességét. Hajnalban és szürkületkor például a nap árnyékai és visszaverődései megzavarhatják az érzékelőket, megnehezítve a tárgyak megkülönböztetését és a potenciális veszélyek azonosítását. Továbbá az ingadozó fényviszonyok befolyásolhatják a járművek által használt objektumérő és -felismerő algoritmusok pontosságát.
"A kulcsfontosságú tényezők közé tartozik az időjárás- és fényérzékelők fejlesztése, redundáns intézkedések végrehajtása és az érzékelőadatok hatékony integrálása. Ezekre a szempontokra összpontosítva az autonóm vezetési rendszerek biztonsága jelentősen javítható a kihívást jelentő helyzeteknél" - áll a kutatásban.
Itt meg kell jegyezni, hogy a tanulmány 2022-ig terjedő adatokra vonatkozik. Az elmúlt két évben a Google tulajdonában lévő Waymo által üzemeltetett autonóm sofőr nélküli taxik egyre több embert szállítottak, és éjjel-nappal közlekednek. Nem tökéletesek és csak néhány városra korlátozódnak, de az biztos, hogy az elmúlt mintegy 24 hónapban legalább némi fejlődés tapasztalható, és a befektetők nagy téteket tettek rájuk.