SG.hu·
Egyszerűen megtéveszthetők az autonóm autók

Kutatók felfedeztek egy egyszerű módszert az okosgépkocsik összezavarására.
Az önvezetés terén legbátrabban viselkedő Tesla a múlt héten mutatta be a népautónak szánt 3-mas modellt, az S-osztályú Mercedes városok között tud egyedül közlekedni, és olyan óriáscégek tesztelnek régóta zsúfolt metropoliszokban, mint a Google, a General Motors vagy az Uber. A cégek ígérete szerint csak néhány év, és jóval biztonságosabb lesz a közlekedés. Azonban most kiderült, hogy a rengeteg szenzor és a hatalmas számítási kapacitás dacára a számítógépek akár egyszerű mintafelismerés terén elbuknak, ha nem látják tökéletesen az előre beprogramozott dolgokat.

A szoftverek többféle szögből és eltérő távolságból felvett felvételekkel dolgoztak
A Washingtoni Egyetem, a Michigani Egyetem, a Stony Brook Egyetem és a Berkeley Egyetem tudósaiból álló csoport rájött arra, hogy elegendő a közlekedési táblákat, illetve azok egyes részeit vagy betűit egyszerűen leragasztani és így máris téves információk jutnak el az önállóan közlekedő járművekhez. A teszt kiválóan bemutatta azt, hogy a jelenlegi rendszereknek még nagyon sokat kell tanulniuk és egyáltalán nem biztosítanak biztonságos autonóm közlekedést.
Az emberi sofőrök alig veszik észre, ha valaki például fekete vagy fehér csíkokat ragaszt a közlekedési táblákra, ami bármikor előfordulhat, ha belóg egy faág vagy valami miatt összekoszolódik a felület. A gépek kiszúrják ugyanakkor ezeket a dolgokat, de többnyire tévesen értelmezik a látottakat. A szakemberek a gyártók által használt összes rendszert megvizsgálták, mindenekelőtt azt tanulmányozták, hogy azok miként ismerik fel, értelmezik és osztályozzák a videofelvételeket. A megtévesztés olyannyira sikeresnek bizonyult, hogy az utolsó teszten a hibaarány 100 százalék volt, vagyis az alkalmazott szoftverek számára az adott közlekedési táblák felismerhetetlenek voltak.
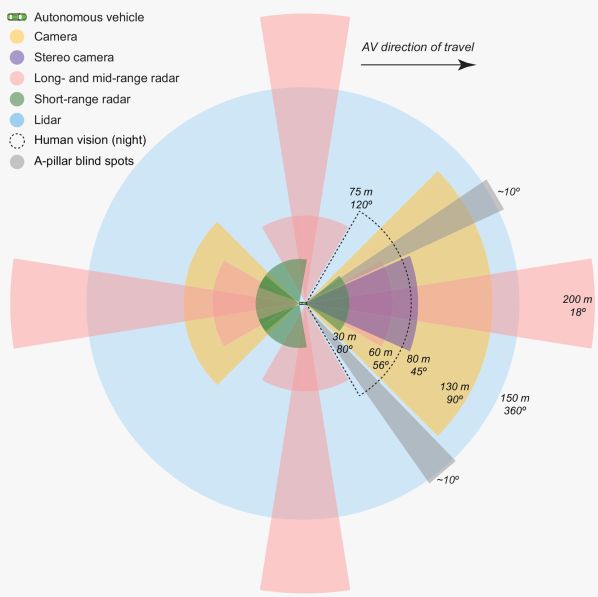
Szaggatott vonal jelzi egy emberi sofőr érzékelési területét és mindenféle színek az önvezető autók szenzorait
Más esetekben sikerült "bebeszélni" rendszernek, hogy nem egy stoptáblát lát, hanem sebességkorlátozást. Ezeknél az eseteknél az autók 73,33 százaléka tévesen azonosította a látott képeket. A tesztek már csak azért is elgondolkodtatók voltak, mert a táblák szennyezettek lehetnek vagy például be is festhetik azokat. A szakemberek eltérő távolságokból és szögekből is elvégezték a teszteket. Az általános megállapításuk az volt, hogy az emberi sofőrök ezekre a dolgokra aligha figyeltek volna fel, illetve nem bizonytalanodtak volna el. Azonban, ha egy rendszer hibázik és figyelmen kívül hagy például egy stoptáblát, akkor annak komoly következményei lehetnek.
A problémára egyelőre még nem létezik megoldás. A mintafelismerésen mindenképpen jelentősen javítani kell és ajánlott lehet az olyan digitális térképek használata is, amelyeken fel vannak tüntetve a közlekedési táblák - ez utóbbit támasztotta alá Brandon Schoettle is, a Michigani Egyetem Közlekedéskutató Intézetének munkatársa, aki a gépi és az emberi vezetési tudást hasonlította össze egymással. Az eredmény az lett, hogy az önállóan közlekedő gépkocsik sokkal biztonságosabban közlekedtek, mint egy 16 éves kezdő vagy egy 90 éves nyugdíjas sofőr, ugyanakkor sokkal rosszabban, mint egy tapasztalt vezető. Az is igaz, hogy soha nem fáradtak, nem isznak és nem vonják el a figyelmüket a hátsó ülésen randalírozó gyerekek. De az algoritmusok sokszor túlzottan óvatosak, ugyanakkor gyorsan összezavarodnak az általuk átláthatatlannak ítélt helyzetekben, vagy akár egy az utcán átrepülő nejlonzacskó által.
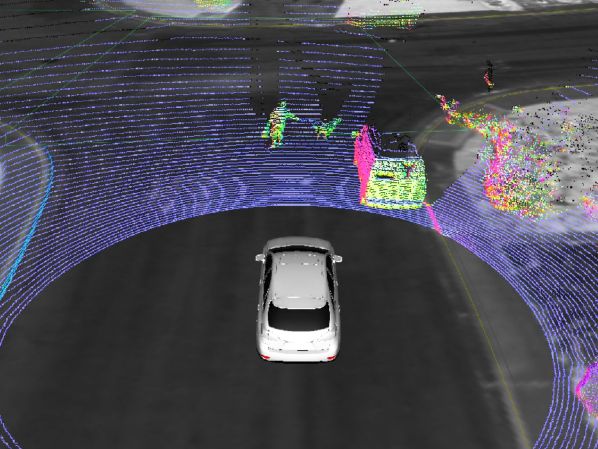
Így lát a Google lidarja egy kutyát sétáltató embert és egy parkoló autót
Az autonóm járművek rendszereinek még hiányzik a kellő tapasztalat a biztonságos és hatékony vezetéshez. Képtelenek megismételni az emberi trükköket és rosszak az élfelismerésben (mikor kezdődik és ér véget egy dolog). Az emberi agy nagyságrendekkel jobb a nagy tömegű információ feldolgozásában és a sok betűt tartalmazó táblák azonosításában. A fix szenzorokkal szemben a nyak forgatható, és az érzékelési holtterek akár az ablakon való kihajolással eltüntethetők. Az embereknek nem kell egyértelmű elválasztóvonal a sávok között haladáshoz, és rengeteg nem-verbális jelet használunk közlekedés közben, kezdve a szemkontaktustól a kézzel való intésig.
Egy parkolóból a zsúfolt útra való kihajtás ma szinte lehetetlen feladat a gépek számára: a számítógép örökké várni fog egy nagyobb résre, ami csúcsidőben akár fél órán át sem fordul elő. Effajta rugalmasságot, a körülményekhez való adaptálódást borzasztó nehéz jól leprogramozni. Mindezek ellenére a gépeknek megvannak a saját előnyeik, mint például az éjszakai látás, amit az embereknél a reflektor 80 méter körül behatárol, míg egy radar akár 250 méterig hatékony, és mindezt 360 fokban. Reakcióidőben sem vagyunk sehol sem, az emberi 1,6 másodperc harmadával lehet egy önvezető autónál számolni. És az emberi szemkontaktust messze meghaladhatja az autók közötti kommunikáció hatékonysága, ha kiépül az ahhoz szükséges 5G mobilhálózat.
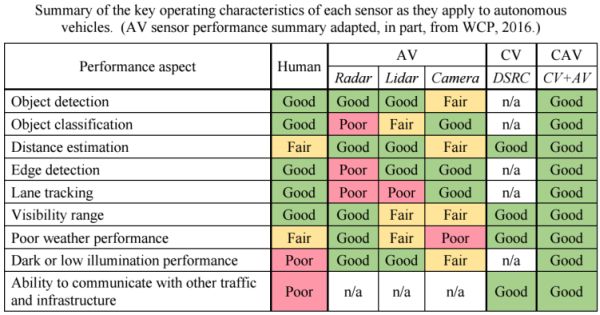
Minden érzékelő van amiben rosszul teljesít, de összekapcsolva őket ez semlegesíthető
A tanulmány végkövetkeztetése, hogy a legjobb emberi helyettesítő a szenzorok egyesítése (a különböző érzékelők adatfolyamának közös feldolgozása) és a járművek összekapcsolása. Ez a két technológia egymástól független, és eddig a fejlesztésük is teljesen külön zajlott, az integrációra nem sok figyelmet fordítottak. Azonban ha az önvezető jövőhöz feltétlen szükséges az összekapcsolás is, akkor újabb problémakör jön képbe, mégpedig az adatvédelem. Egy hálózatot jóval nehezebb megvédeni a hackerektől, mint egy önálló járművet, elég, ha az egyik pont nem biztonságos. Ez azonban eddig nem volt fő szempont a gyártók számára, sok modell elég könnyen feltörhető.
Szóval a teljesen önvezető autó még messze nincs kész, és még évekig nem is lesz, de egyre jobbak, és minden embernek nagyon igyekeznie kell, ha később is jobb akar lenni náluk.
Az önvezetés terén legbátrabban viselkedő Tesla a múlt héten mutatta be a népautónak szánt 3-mas modellt, az S-osztályú Mercedes városok között tud egyedül közlekedni, és olyan óriáscégek tesztelnek régóta zsúfolt metropoliszokban, mint a Google, a General Motors vagy az Uber. A cégek ígérete szerint csak néhány év, és jóval biztonságosabb lesz a közlekedés. Azonban most kiderült, hogy a rengeteg szenzor és a hatalmas számítási kapacitás dacára a számítógépek akár egyszerű mintafelismerés terén elbuknak, ha nem látják tökéletesen az előre beprogramozott dolgokat.
A szoftverek többféle szögből és eltérő távolságból felvett felvételekkel dolgoztak
A Washingtoni Egyetem, a Michigani Egyetem, a Stony Brook Egyetem és a Berkeley Egyetem tudósaiból álló csoport rájött arra, hogy elegendő a közlekedési táblákat, illetve azok egyes részeit vagy betűit egyszerűen leragasztani és így máris téves információk jutnak el az önállóan közlekedő járművekhez. A teszt kiválóan bemutatta azt, hogy a jelenlegi rendszereknek még nagyon sokat kell tanulniuk és egyáltalán nem biztosítanak biztonságos autonóm közlekedést.
Az emberi sofőrök alig veszik észre, ha valaki például fekete vagy fehér csíkokat ragaszt a közlekedési táblákra, ami bármikor előfordulhat, ha belóg egy faág vagy valami miatt összekoszolódik a felület. A gépek kiszúrják ugyanakkor ezeket a dolgokat, de többnyire tévesen értelmezik a látottakat. A szakemberek a gyártók által használt összes rendszert megvizsgálták, mindenekelőtt azt tanulmányozták, hogy azok miként ismerik fel, értelmezik és osztályozzák a videofelvételeket. A megtévesztés olyannyira sikeresnek bizonyult, hogy az utolsó teszten a hibaarány 100 százalék volt, vagyis az alkalmazott szoftverek számára az adott közlekedési táblák felismerhetetlenek voltak.
Szaggatott vonal jelzi egy emberi sofőr érzékelési területét és mindenféle színek az önvezető autók szenzorait
Más esetekben sikerült "bebeszélni" rendszernek, hogy nem egy stoptáblát lát, hanem sebességkorlátozást. Ezeknél az eseteknél az autók 73,33 százaléka tévesen azonosította a látott képeket. A tesztek már csak azért is elgondolkodtatók voltak, mert a táblák szennyezettek lehetnek vagy például be is festhetik azokat. A szakemberek eltérő távolságokból és szögekből is elvégezték a teszteket. Az általános megállapításuk az volt, hogy az emberi sofőrök ezekre a dolgokra aligha figyeltek volna fel, illetve nem bizonytalanodtak volna el. Azonban, ha egy rendszer hibázik és figyelmen kívül hagy például egy stoptáblát, akkor annak komoly következményei lehetnek.
A problémára egyelőre még nem létezik megoldás. A mintafelismerésen mindenképpen jelentősen javítani kell és ajánlott lehet az olyan digitális térképek használata is, amelyeken fel vannak tüntetve a közlekedési táblák - ez utóbbit támasztotta alá Brandon Schoettle is, a Michigani Egyetem Közlekedéskutató Intézetének munkatársa, aki a gépi és az emberi vezetési tudást hasonlította össze egymással. Az eredmény az lett, hogy az önállóan közlekedő gépkocsik sokkal biztonságosabban közlekedtek, mint egy 16 éves kezdő vagy egy 90 éves nyugdíjas sofőr, ugyanakkor sokkal rosszabban, mint egy tapasztalt vezető. Az is igaz, hogy soha nem fáradtak, nem isznak és nem vonják el a figyelmüket a hátsó ülésen randalírozó gyerekek. De az algoritmusok sokszor túlzottan óvatosak, ugyanakkor gyorsan összezavarodnak az általuk átláthatatlannak ítélt helyzetekben, vagy akár egy az utcán átrepülő nejlonzacskó által.
Így lát a Google lidarja egy kutyát sétáltató embert és egy parkoló autót
Az autonóm járművek rendszereinek még hiányzik a kellő tapasztalat a biztonságos és hatékony vezetéshez. Képtelenek megismételni az emberi trükköket és rosszak az élfelismerésben (mikor kezdődik és ér véget egy dolog). Az emberi agy nagyságrendekkel jobb a nagy tömegű információ feldolgozásában és a sok betűt tartalmazó táblák azonosításában. A fix szenzorokkal szemben a nyak forgatható, és az érzékelési holtterek akár az ablakon való kihajolással eltüntethetők. Az embereknek nem kell egyértelmű elválasztóvonal a sávok között haladáshoz, és rengeteg nem-verbális jelet használunk közlekedés közben, kezdve a szemkontaktustól a kézzel való intésig.
Egy parkolóból a zsúfolt útra való kihajtás ma szinte lehetetlen feladat a gépek számára: a számítógép örökké várni fog egy nagyobb résre, ami csúcsidőben akár fél órán át sem fordul elő. Effajta rugalmasságot, a körülményekhez való adaptálódást borzasztó nehéz jól leprogramozni. Mindezek ellenére a gépeknek megvannak a saját előnyeik, mint például az éjszakai látás, amit az embereknél a reflektor 80 méter körül behatárol, míg egy radar akár 250 méterig hatékony, és mindezt 360 fokban. Reakcióidőben sem vagyunk sehol sem, az emberi 1,6 másodperc harmadával lehet egy önvezető autónál számolni. És az emberi szemkontaktust messze meghaladhatja az autók közötti kommunikáció hatékonysága, ha kiépül az ahhoz szükséges 5G mobilhálózat.
Minden érzékelő van amiben rosszul teljesít, de összekapcsolva őket ez semlegesíthető
A tanulmány végkövetkeztetése, hogy a legjobb emberi helyettesítő a szenzorok egyesítése (a különböző érzékelők adatfolyamának közös feldolgozása) és a járművek összekapcsolása. Ez a két technológia egymástól független, és eddig a fejlesztésük is teljesen külön zajlott, az integrációra nem sok figyelmet fordítottak. Azonban ha az önvezető jövőhöz feltétlen szükséges az összekapcsolás is, akkor újabb problémakör jön képbe, mégpedig az adatvédelem. Egy hálózatot jóval nehezebb megvédeni a hackerektől, mint egy önálló járművet, elég, ha az egyik pont nem biztonságos. Ez azonban eddig nem volt fő szempont a gyártók számára, sok modell elég könnyen feltörhető.
Szóval a teljesen önvezető autó még messze nincs kész, és még évekig nem is lesz, de egyre jobbak, és minden embernek nagyon igyekeznie kell, ha később is jobb akar lenni náluk.