SG.hu·
Denevérszárnyakon repülhetnek a robotok
A denevér szárnyának mozgását kihasználó Batbot mozgékonyabb és észrevehetetlenebb robotrepülőgépeket eredményezhet.
Az Egyesült Államok Hadserege, a kísérlet egyik finanszírozója nagy fantáziát lát az olyan robotrepülőkben, amik a madarakéhoz hasonló mozgó szárnyakkal rendelkeznek, mivel sokkal jobb eredményeket érhetnek el velük a lopakodásban, mint a gyorsabb, rögzített szárnyú gépekkel.
 "A denevérszárny rendkívül tagolt, a szárny váza nagyban hasonlít az emberi karra és kézre" - taglalta a kutatást vezető Julian Colorado, a Madridi Műszaki Egyetem mérnöke. "Hatalmas potenciál rejlik abban, ahogy a denevér megváltoztatja szárnyainak alakját a mikroméretű légi járművek manőverezhetőségét illetően"
"A denevérszárny rendkívül tagolt, a szárny váza nagyban hasonlít az emberi karra és kézre" - taglalta a kutatást vezető Julian Colorado, a Madridi Műszaki Egyetem mérnöke. "Hatalmas potenciál rejlik abban, ahogy a denevér megváltoztatja szárnyainak alakját a mikroméretű légi járművek manőverezhetőségét illetően"
Colorado Spanyolországban, valamint munkatársai a Rhode Islandi Brown Egyetemen meg is építettek egy denevér inspirálta, félméteres szárnyfesztávolságú robotrepülőt. A Batbot lemásolta azt a megoldást, amivel a denevér lefelé és felfelé irányuló szárnycsapásai között megváltoztatja szárnyai alakját.
A lefelé irányuló mozgásnál nagy felszíni felületre van szükség a felhajtóerő és a hajtóerő generálásához. A felfelé irányuló mozgásnál azonban ugyanez a nagy felület légellenállást keltene, ezért a denevér befelé hajtja szárnyait. A robot esetében a lágy szilikonszárnyak fel-le csapkodó mozgását egy, a géptörzsben elhelyezett elektromos motor végzi, hasonlóan a többi madárszerűen csapkodó robotrepülőhöz. A különbség, hogy a szárny kitárását és összehúzását alakemlékező ötvözetből készült drótok vezérlik, amik elektromos feszültség hatására két különböző alakzat között váltakoznak, nagyon hasonlóan az emberi tricepsz és bicepsz működésére.
A robot "válla" és "könyöke" között elhelyezkedő drótok forgatják a könyököt, behúzzák az "ujjakat", hogy minél karcsúbb legyen a szárnyszelvény a felfelé irányuló mozgásnál. "Ez a természeteshez hasonló szárny összezárásokat és kifeszítéseket eredményez" - mondta Colorado.
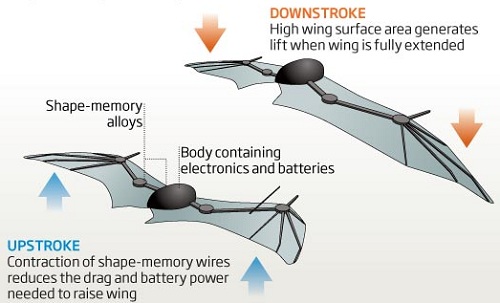
A Newscientist illusztrációja a szárny működéséről
A Batbot repülése még nem tekinthető stabilnak, azonban Dario Floreano, a lausanne-i Svájci Nemzeti Robottechnikai Központ igazgatója így is "nagy lépésnek" tartja egy fürgébb és önállóbb repülő robot megvalósítása irányába. "Jó példája a merev mechanikus alkatrészek felől a lágyabb anyagokból, rugalmasabb összetevőkből és mesterséges izmokból készülő, nagyobb agilitású bionikus rendszerek felé történő elmozdulásra" - mondta Floreano.
Az Egyesült Államok Hadserege, a kísérlet egyik finanszírozója nagy fantáziát lát az olyan robotrepülőkben, amik a madarakéhoz hasonló mozgó szárnyakkal rendelkeznek, mivel sokkal jobb eredményeket érhetnek el velük a lopakodásban, mint a gyorsabb, rögzített szárnyú gépekkel.
"A denevérszárny rendkívül tagolt, a szárny váza nagyban hasonlít az emberi karra és kézre" - taglalta a kutatást vezető Julian Colorado, a Madridi Műszaki Egyetem mérnöke. "Hatalmas potenciál rejlik abban, ahogy a denevér megváltoztatja szárnyainak alakját a mikroméretű légi járművek manőverezhetőségét illetően"Colorado Spanyolországban, valamint munkatársai a Rhode Islandi Brown Egyetemen meg is építettek egy denevér inspirálta, félméteres szárnyfesztávolságú robotrepülőt. A Batbot lemásolta azt a megoldást, amivel a denevér lefelé és felfelé irányuló szárnycsapásai között megváltoztatja szárnyai alakját.
A lefelé irányuló mozgásnál nagy felszíni felületre van szükség a felhajtóerő és a hajtóerő generálásához. A felfelé irányuló mozgásnál azonban ugyanez a nagy felület légellenállást keltene, ezért a denevér befelé hajtja szárnyait. A robot esetében a lágy szilikonszárnyak fel-le csapkodó mozgását egy, a géptörzsben elhelyezett elektromos motor végzi, hasonlóan a többi madárszerűen csapkodó robotrepülőhöz. A különbség, hogy a szárny kitárását és összehúzását alakemlékező ötvözetből készült drótok vezérlik, amik elektromos feszültség hatására két különböző alakzat között váltakoznak, nagyon hasonlóan az emberi tricepsz és bicepsz működésére.
A robot "válla" és "könyöke" között elhelyezkedő drótok forgatják a könyököt, behúzzák az "ujjakat", hogy minél karcsúbb legyen a szárnyszelvény a felfelé irányuló mozgásnál. "Ez a természeteshez hasonló szárny összezárásokat és kifeszítéseket eredményez" - mondta Colorado.
A Newscientist illusztrációja a szárny működéséről
A Batbot repülése még nem tekinthető stabilnak, azonban Dario Floreano, a lausanne-i Svájci Nemzeti Robottechnikai Központ igazgatója így is "nagy lépésnek" tartja egy fürgébb és önállóbb repülő robot megvalósítása irányába. "Jó példája a merev mechanikus alkatrészek felől a lágyabb anyagokból, rugalmasabb összetevőkből és mesterséges izmokból készülő, nagyobb agilitású bionikus rendszerek felé történő elmozdulásra" - mondta Floreano.