SG.hu·
Tintahal meghajtást a tengeralattjárókra
A Colorado Egyetem csapata egy olyan újszerű vízi hajtóművet tervezett, melyet a fejlábúak ihlettek.
 Bár a tintahalak és a medúzák nem rendelkeznek sem farokkal, sem uszonyokkal, mégis ők képesek a leghatékonyabb manőverezésre a tengerek lakói közül. Az egyetem űrrepülés műszaki tudományainak professzora, Kamran Mohseni által vezetett projekt fő célja egy önrendelkezésű vízalatti járműflotta kifejlesztése, ami képes az óceán állapotváltozásainak mérésére és nyomon követésére. A kutatók szerint azonban a hajtómű nem csupán az áramvonalas vízi járművek esetében lesz alkalmazható, kellő mértékben lekicsinyítve az emberi emésztőszervekbe beküldhető parányi diagnosztizáló robotokat is építhetnek vele.
Bár a tintahalak és a medúzák nem rendelkeznek sem farokkal, sem uszonyokkal, mégis ők képesek a leghatékonyabb manőverezésre a tengerek lakói közül. Az egyetem űrrepülés műszaki tudományainak professzora, Kamran Mohseni által vezetett projekt fő célja egy önrendelkezésű vízalatti járműflotta kifejlesztése, ami képes az óceán állapotváltozásainak mérésére és nyomon követésére. A kutatók szerint azonban a hajtómű nem csupán az áramvonalas vízi járművek esetében lesz alkalmazható, kellő mértékben lekicsinyítve az emberi emésztőszervekbe beküldhető parányi diagnosztizáló robotokat is építhetnek vele.
Jelenleg a gyors, torpedó alakú eszközök a klasszikus hátul elhelyezett propelleres meghajtást alkalmazzák, mellyel igen nagy sebességre tehetnek szert, a manőverezés azonban egyáltalán nem az erősségük. A kevésbé áramvonalas járművek jókora hajtóműveikkel már kifejezetten pontosan mozognak a víz alatt, azonban többségük lassú, emellett pedig pont a hajtóművek miatt túl terjedelmesek ahhoz, hogy kis helyeken ellavírozzanak. Mohseni professzor éppen ezért valami olyat szeretett volna alkotni, ami a két típus pozitív tulajdonságait egyesíti magában.
Az űrrepülési technikák szakértője és munkatársai nem először fordulnak a természethez segítségért. Készítettek már parányi légijármű flottát, melynek tagjai a madarak szárnycsapásait utánozva alkalmazkodnak a légköri vagy repülési körülmények változásaihoz. Ha vízi járműről van szó, akkor pedig hol máshol kutakodna az ember mint a víz alatt, így jutottak el a tintahalakhoz és medúzákhoz.
 Ezek a lények alapvetően sugárhajtással közlekednek. Egy tintahal például beszippantja a vizet egy, a fején található nyíláson, az úgynevezett köpenyüregen át, majd amint elég víz áramlott be a tintahal köpenye lezár minden egyes nyílást, leszámítva egy csőszerű képződményt, a szifont, melyen át a köpenyfal izmai nagy erővel kipréselik a vizet. A sugár kitör, előre tolva a lábfejűt. Azt hogy az általa preferált irányba haladjon, a tintahal a szifon mozgatásával éri el. A tintahalak a gerinctelen tengeri lények közül a leggyorsabbak, óránként 40 kilométeres sebességgel is képesek haladni, meglepően fürgén reagálva egy esetlegesen előttük felbukkanó akadályra.
Ezek a lények alapvetően sugárhajtással közlekednek. Egy tintahal például beszippantja a vizet egy, a fején található nyíláson, az úgynevezett köpenyüregen át, majd amint elég víz áramlott be a tintahal köpenye lezár minden egyes nyílást, leszámítva egy csőszerű képződményt, a szifont, melyen át a köpenyfal izmai nagy erővel kipréselik a vizet. A sugár kitör, előre tolva a lábfejűt. Azt hogy az általa preferált irányba haladjon, a tintahal a szifon mozgatásával éri el. A tintahalak a gerinctelen tengeri lények közül a leggyorsabbak, óránként 40 kilométeres sebességgel is képesek haladni, meglepően fürgén reagálva egy esetlegesen előttük felbukkanó akadályra.
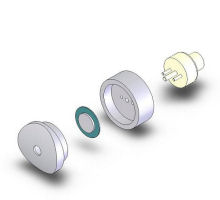
Mondani sem kell, hogy a Mohseni által tervezett hajtómű működése ugyanezt az elvet követi, rendelkezik egy üreggel és egy hengeres kimeneti nyílással. Az izomerőt egy pumpa pótolja. A hajtómű az egyik végén beszippantja a vizet, majd a pumpa közreműködésével a másikon kinyomja azt, az eredményt a tintahalnál már leírtuk.
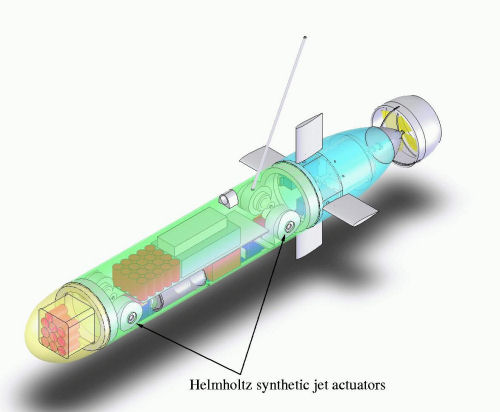
A kutatócsoport megépített egy szivar alakú, közel 1,4 méter hosszú tengeralattjárót is, amit négy ilyen hajtóművel láttak el. Kettő a jármű elejére, kettő a végére került, aktuátorként beleolvadva a testébe, nem bontva meg az áramvonalas hatást. Mivel a tintahal ihlette hajtómű ebben az esetben kizárólag a manőverezést segíti, a tengeralattjárót ellátták egy hagyományos hátsó propellerrel is, ami a sebességet hivatott biztosítani. Az aktuátorként funkcionáló tintahal hajtóművek tehát csak akkor veszik át az irányítást, amikor a járműnek valamilyen szűk helyen kell átmanővereznie magát.
A gyakorlatban ez valahogy úgy néz ki, hogy egy-egy adott pillanatban csak egy bizonyos hajtómű aktív a négyből. Például ha a jobb első lök ki magából egy vízsugarat, akkor a jármű eleje balra mozdul, ugyanez a bal hátsó hajtómű esetében a jármű végét mozdítja el jobb irányba.
A szakértők életképesnek tartják az innovatív megoldást, külön kiemelve a két különböző meghajtás alkalmazását egy járművön. Az új hajtóműrendszerrel Mohseni csapatának sikerült párhuzamosan beparkolnia az 1,4 méteres járművet egy másfél méter hosszú helyre.
Bár a tintahalak és a medúzák nem rendelkeznek sem farokkal, sem uszonyokkal, mégis ők képesek a leghatékonyabb manőverezésre a tengerek lakói közül. Az egyetem űrrepülés műszaki tudományainak professzora, Kamran Mohseni által vezetett projekt fő célja egy önrendelkezésű vízalatti járműflotta kifejlesztése, ami képes az óceán állapotváltozásainak mérésére és nyomon követésére. A kutatók szerint azonban a hajtómű nem csupán az áramvonalas vízi járművek esetében lesz alkalmazható, kellő mértékben lekicsinyítve az emberi emésztőszervekbe beküldhető parányi diagnosztizáló robotokat is építhetnek vele.Jelenleg a gyors, torpedó alakú eszközök a klasszikus hátul elhelyezett propelleres meghajtást alkalmazzák, mellyel igen nagy sebességre tehetnek szert, a manőverezés azonban egyáltalán nem az erősségük. A kevésbé áramvonalas járművek jókora hajtóműveikkel már kifejezetten pontosan mozognak a víz alatt, azonban többségük lassú, emellett pedig pont a hajtóművek miatt túl terjedelmesek ahhoz, hogy kis helyeken ellavírozzanak. Mohseni professzor éppen ezért valami olyat szeretett volna alkotni, ami a két típus pozitív tulajdonságait egyesíti magában.
Az űrrepülési technikák szakértője és munkatársai nem először fordulnak a természethez segítségért. Készítettek már parányi légijármű flottát, melynek tagjai a madarak szárnycsapásait utánozva alkalmazkodnak a légköri vagy repülési körülmények változásaihoz. Ha vízi járműről van szó, akkor pedig hol máshol kutakodna az ember mint a víz alatt, így jutottak el a tintahalakhoz és medúzákhoz.
Ezek a lények alapvetően sugárhajtással közlekednek. Egy tintahal például beszippantja a vizet egy, a fején található nyíláson, az úgynevezett köpenyüregen át, majd amint elég víz áramlott be a tintahal köpenye lezár minden egyes nyílást, leszámítva egy csőszerű képződményt, a szifont, melyen át a köpenyfal izmai nagy erővel kipréselik a vizet. A sugár kitör, előre tolva a lábfejűt. Azt hogy az általa preferált irányba haladjon, a tintahal a szifon mozgatásával éri el. A tintahalak a gerinctelen tengeri lények közül a leggyorsabbak, óránként 40 kilométeres sebességgel is képesek haladni, meglepően fürgén reagálva egy esetlegesen előttük felbukkanó akadályra.Mondani sem kell, hogy a Mohseni által tervezett hajtómű működése ugyanezt az elvet követi, rendelkezik egy üreggel és egy hengeres kimeneti nyílással. Az izomerőt egy pumpa pótolja. A hajtómű az egyik végén beszippantja a vizet, majd a pumpa közreműködésével a másikon kinyomja azt, az eredményt a tintahalnál már leírtuk.
A kutatócsoport megépített egy szivar alakú, közel 1,4 méter hosszú tengeralattjárót is, amit négy ilyen hajtóművel láttak el. Kettő a jármű elejére, kettő a végére került, aktuátorként beleolvadva a testébe, nem bontva meg az áramvonalas hatást. Mivel a tintahal ihlette hajtómű ebben az esetben kizárólag a manőverezést segíti, a tengeralattjárót ellátták egy hagyományos hátsó propellerrel is, ami a sebességet hivatott biztosítani. Az aktuátorként funkcionáló tintahal hajtóművek tehát csak akkor veszik át az irányítást, amikor a járműnek valamilyen szűk helyen kell átmanővereznie magát.
A gyakorlatban ez valahogy úgy néz ki, hogy egy-egy adott pillanatban csak egy bizonyos hajtómű aktív a négyből. Például ha a jobb első lök ki magából egy vízsugarat, akkor a jármű eleje balra mozdul, ugyanez a bal hátsó hajtómű esetében a jármű végét mozdítja el jobb irányba.
A szakértők életképesnek tartják az innovatív megoldást, külön kiemelve a két különböző meghajtás alkalmazását egy járművön. Az új hajtóműrendszerrel Mohseni csapatának sikerült párhuzamosan beparkolnia az 1,4 méteres járművet egy másfél méter hosszú helyre.