SG.hu·
Európa űrhajóján a világ szeme
A 19. század végén Jules Verne már megjövendölte az űrutazást, most a róla elnevezett űrhajó olyan automata manőversorozat végrehajtására készül, amit még a nagy író sem tudott elképzelni.
A tét nem akármilyen, siker esetén Európa szerepe a jövő nemzetközi űrküldetéseiben megkérdőjelezhetetlenné válik, technológiáink ott lehetnek a jövő nagy expedícióiban. Az Európai Űrügynökség (ESA) március 9-én indította útjára a Jules Verne automata szállítójárművet (ATV), azóta egyetlen apró hibát tapasztaltak, amit már ki is javítottak, a bizonyítás napja azonban április 3-án következik, amikor az ATV 400 kilométerrel a Föld felett, óránkénti 28000 kilométeres sebességnél összekapcsolódik a Nemzetközi Űrállomás (ISS) Zvezda moduljával. Rendkívül finom manőverről van szó, ahol minden centiméter számít. Ha az ATV hibázik, lyukat üthet az állomás oldalán, kockára téve az ott tartózkodó asztronauták életét.
 Természetesen a bedokkolás rutin műveletnek számít az űrállomáson, ami rendszeresen fogad élelmiszer, víz, oxigén, nitrogén és felszerelés szállítmányokat a Földről. Ennél a bedokkolásnál azonban lesz egy alapvető különbség. Az ember repülte űrsiklókkal és Szojuzokkal szemben a 20 tonnás Jules Verne a finomra hangolt táncot teljes egészében emberi segítség nélkül adja elő, ezzel túllép az orosz Progressz teherhajón is, ami bár legénység nélkül navigál az űrállomásig, a dokkoláskor a földi irányítók távirányítással átveszik az űrhajó vezérlését. "Amikor a dokkolást emberi beavatkozás nélkül kell végrehajtani, akkor biztosnak kell lennünk abban, hogy a szoftver megoldja a feladatot" - mondta Stuart Eves, a brit Surrey Satellite Technology képviselője. "Ez még a jelenlegi műszaki szinten is jókora kihívást jelent"
Természetesen a bedokkolás rutin műveletnek számít az űrállomáson, ami rendszeresen fogad élelmiszer, víz, oxigén, nitrogén és felszerelés szállítmányokat a Földről. Ennél a bedokkolásnál azonban lesz egy alapvető különbség. Az ember repülte űrsiklókkal és Szojuzokkal szemben a 20 tonnás Jules Verne a finomra hangolt táncot teljes egészében emberi segítség nélkül adja elő, ezzel túllép az orosz Progressz teherhajón is, ami bár legénység nélkül navigál az űrállomásig, a dokkoláskor a földi irányítók távirányítással átveszik az űrhajó vezérlését. "Amikor a dokkolást emberi beavatkozás nélkül kell végrehajtani, akkor biztosnak kell lennünk abban, hogy a szoftver megoldja a feladatot" - mondta Stuart Eves, a brit Surrey Satellite Technology képviselője. "Ez még a jelenlegi műszaki szinten is jókora kihívást jelent"
Az ATV sikere megnyugtató megoldást jelentene az űrsiklók visszavonulását követő időszakra, amellett hogy elvileg biztonságosabb módszer lenne az ellátmány szállítására és nagy lépést jelentene a jövő legénység nélküli felderítő küldetései számára is, melyek a Mars és a távolabbi bolygók felé irányulnának. "Messze ez a legbonyolultabb űrhajó, amit Európa valaha épített"- mondta a kivitelezésben közreműködő brit központú EADS Astrium számítógép tudósa, David Berthelier.
Az ellátmány szállítása a Szojuzokkal és az űrsiklókkal egyrészt költséges, másrészt veszélyes a fedélzeten tartózkodó űrhajósokra nézve - egy teljesen automatizált rendszer, mint az ATV, mindkét problémán enyhítene, és az űrállomás lakói számára is biztonságosabb lenne. Az 1980-as évektől lépett be a képbe a Progressz flotta, melyek a Mir űrállomásra szállították a szükséges dolgokat. Ahogy fentebb említettük, a dokkolást a Földről távirányítással végzik, ami 1997 júniusában egy ütközéshez vezetett az egyik teherhajó és a Mir űrállomás között, megsértve az állomás nappaneljeit és oxigén ellátását. Nem tudni pontosan mi okozta a problémát, Berthelier szerint azonban ilyesmi a Jules Vernével nem fordulhat elő. Az ATV teljesen önműködő, vezérlőmechanizmusa a szenzoraival van összeköttetésben, és úgy programozták, hogy képes legyen korrigálni önmagát, reakciója sokkal gyorsabb a problémákra, mint egy emberé.
Elsőként lássuk, hogyan végzi automatikus feladatait a Jules Verne. Jelenleg 250 kilométeres magasságban kering a Föld felett, biztonságos 150 kilométeres távolságban az űrállomás pályája alatt, ahol számos tesztmanővert hajt végre, pontosan lemásolva a dokkolás folyamatát. Amikor a földi csapat meggyőződött róla, hogy a rendszer készen áll a feladatra, kiadják az utasítást az ATV-nek, hogy közelítse meg 30 kilométerre az állomást, itt kezdődik el az összetett csatlakozási procedúra.
Akárcsak az autók műholdas navigációja a Jules Verne is kiszámítja pontos pozícióját a GPS műholdak segítségével, majd összeveti azt az ISS GPS koordinátáival. Az adatokból kapott útvonalterven három fedélzeti számítógép dolgozik, melyek kidolgozzák az űrhajó 28 navigációs rakétájának a működtetését, mikor melyiket és mennyi időre kell beindítani. Az ATV másodpercenként kalibrálja újra GPS információit és programozza át a rakétákat, ha arra szükség van.
Amikor a szállítójármű már csak 250 méterre van az állomástól, teljesen egy vonalba kell kerülnie a Zvezda modullal, ekkor veti be a Jules Verne radarhoz hasonló lézeres mérőrendszerét. Az űrjármű rövid lézerimpulzusokat küld a dokkoló port körül elhelyezett fényvisszaverő pontokra, a visszavert fényt pedig kameráival rögzíti. Az impulzus kibocsátása és a fény visszaérkezése között eltelt időből határozható meg az ATV és a Zvezda közötti távolság, illetve a visszaérkező fényből azt is megállapítja a számítógépes rendszer, hogy milyen szögben áll a jármű az állomáshoz viszonyítva.
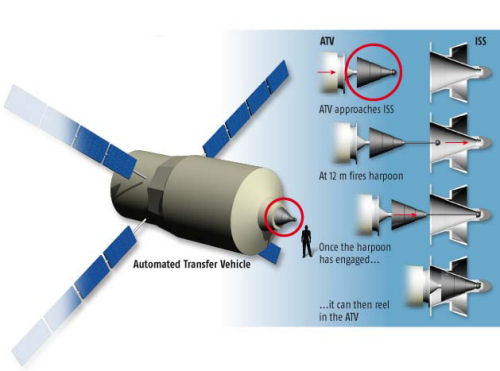
A biztonság kedvéért az égen látható csillagképekről is felvételeket készít, amit csillagtérképeivel összehasonlít, kiszámítva a csillagokhoz, valamint az űrállomáshoz viszonyított orientációját. Végül, amikor már csak 12 méterre van az ISS-től, az ATV "megszigonyozza" az állomást, azaz egy kábelt lő ki a Zvezda egyik csatlakozási pontjába, majd elkezdi felcsévélni magát, a bedokkolást enyhe zökkenés jelzi majd, ami erejét tekintve egy apró parkolói koccanással lesz egyenértékű, magyarázta Franco Bonacina, az ESA francia munkatársa.
A dokkolás mellett szoftver vezérli az ATV nappaneljeit is, fűtő- és hűtőrendszereit és a komponensek közötti energia felosztást. Az emberi beavatkozás csak annyiban nyilvánul meg, hogy leállíthatják a dokkolási műveletet, ha valami végleg balul sülne el, és biztonságos parkoló pályára állíthatják a rendszert, ahol letesztelhetik, illetve kijavíthatják a hibákat és folytathatják a küldetést, vagy visszahozhatják a járművet a légkörbe. Ezeket a műveleteket is a szoftver végzi el, az emberek csupán utasításokat adhatnak, melyek aktiválják az előre betáplált programokat.
Az ATV kiürítése után az ISS lakói átpakolják az állomáson keletkezett hulladékot a Jules Vernébe, majd visszaküldik a Földre, ahol a légkörbe belépve elég. A következő ATV-k már hőpajzsokkal is fel lesznek szerelve, így az űrhajó jelentős része újrahasznosíthatóvá válik, és mivel az ATV koncpció emberek szállítására is alkalmas, gyakorlatilag ilyen téren is kiválthatja az űrsiklót, bár irányítását továbbra is számítógép végzi majd, az űrhajósok tehát csak utasok lennének.
Az automatikus rendszer az ESA szerint ideális a bolygókutatáshoz vagy a mélyűr expedíciókhoz, ahol sokáig tarthat, míg a kommunikációs jelek megteszik az űrhajó és az anyabolygó között tátongó távolságot. A jelenlegi rendszerek, mint például a MER marsjárók, hosszú időszakokat töltenek tétlenül, várva a földi jeleket, azonban ha ilyen mérvű automatizmussal szerelnék fel őket, nem kellene jelentős földi irányítási erőforrásokat mozgósítani, nyilatkozott Adam Baker, a Surrey Satellite Technologies specialistája.
A Jules Verne legnagyobb hatása a várakozásokkal ellentétben nem műszaki, vagy tudományos, hanem politikai lehet. Az ambiciózus projekt sikere arra sarkallhatja a NASA-t és vele együtt az Egyesült Államokat, hogy egyenlőbben ossza el a felelősségeket és kötelezettségeket a nemzetközi űrügynökségek között. "Ez felbátoríthatná, (vagy rákényszeríthetné) Amerikát, hogy visszavonuljon többségi pozíciójából" - tette hozzá Tim Stevenson, a Leicester Egyetem Űrkutatási Központjának főmérnöke.
A tét nem akármilyen, siker esetén Európa szerepe a jövő nemzetközi űrküldetéseiben megkérdőjelezhetetlenné válik, technológiáink ott lehetnek a jövő nagy expedícióiban. Az Európai Űrügynökség (ESA) március 9-én indította útjára a Jules Verne automata szállítójárművet (ATV), azóta egyetlen apró hibát tapasztaltak, amit már ki is javítottak, a bizonyítás napja azonban április 3-án következik, amikor az ATV 400 kilométerrel a Föld felett, óránkénti 28000 kilométeres sebességnél összekapcsolódik a Nemzetközi Űrállomás (ISS) Zvezda moduljával. Rendkívül finom manőverről van szó, ahol minden centiméter számít. Ha az ATV hibázik, lyukat üthet az állomás oldalán, kockára téve az ott tartózkodó asztronauták életét.
Természetesen a bedokkolás rutin műveletnek számít az űrállomáson, ami rendszeresen fogad élelmiszer, víz, oxigén, nitrogén és felszerelés szállítmányokat a Földről. Ennél a bedokkolásnál azonban lesz egy alapvető különbség. Az ember repülte űrsiklókkal és Szojuzokkal szemben a 20 tonnás Jules Verne a finomra hangolt táncot teljes egészében emberi segítség nélkül adja elő, ezzel túllép az orosz Progressz teherhajón is, ami bár legénység nélkül navigál az űrállomásig, a dokkoláskor a földi irányítók távirányítással átveszik az űrhajó vezérlését. "Amikor a dokkolást emberi beavatkozás nélkül kell végrehajtani, akkor biztosnak kell lennünk abban, hogy a szoftver megoldja a feladatot" - mondta Stuart Eves, a brit Surrey Satellite Technology képviselője. "Ez még a jelenlegi műszaki szinten is jókora kihívást jelent"Az ATV sikere megnyugtató megoldást jelentene az űrsiklók visszavonulását követő időszakra, amellett hogy elvileg biztonságosabb módszer lenne az ellátmány szállítására és nagy lépést jelentene a jövő legénység nélküli felderítő küldetései számára is, melyek a Mars és a távolabbi bolygók felé irányulnának. "Messze ez a legbonyolultabb űrhajó, amit Európa valaha épített"- mondta a kivitelezésben közreműködő brit központú EADS Astrium számítógép tudósa, David Berthelier.
Az ellátmány szállítása a Szojuzokkal és az űrsiklókkal egyrészt költséges, másrészt veszélyes a fedélzeten tartózkodó űrhajósokra nézve - egy teljesen automatizált rendszer, mint az ATV, mindkét problémán enyhítene, és az űrállomás lakói számára is biztonságosabb lenne. Az 1980-as évektől lépett be a képbe a Progressz flotta, melyek a Mir űrállomásra szállították a szükséges dolgokat. Ahogy fentebb említettük, a dokkolást a Földről távirányítással végzik, ami 1997 júniusában egy ütközéshez vezetett az egyik teherhajó és a Mir űrállomás között, megsértve az állomás nappaneljeit és oxigén ellátását. Nem tudni pontosan mi okozta a problémát, Berthelier szerint azonban ilyesmi a Jules Vernével nem fordulhat elő. Az ATV teljesen önműködő, vezérlőmechanizmusa a szenzoraival van összeköttetésben, és úgy programozták, hogy képes legyen korrigálni önmagát, reakciója sokkal gyorsabb a problémákra, mint egy emberé.
Elsőként lássuk, hogyan végzi automatikus feladatait a Jules Verne. Jelenleg 250 kilométeres magasságban kering a Föld felett, biztonságos 150 kilométeres távolságban az űrállomás pályája alatt, ahol számos tesztmanővert hajt végre, pontosan lemásolva a dokkolás folyamatát. Amikor a földi csapat meggyőződött róla, hogy a rendszer készen áll a feladatra, kiadják az utasítást az ATV-nek, hogy közelítse meg 30 kilométerre az állomást, itt kezdődik el az összetett csatlakozási procedúra.
Akárcsak az autók műholdas navigációja a Jules Verne is kiszámítja pontos pozícióját a GPS műholdak segítségével, majd összeveti azt az ISS GPS koordinátáival. Az adatokból kapott útvonalterven három fedélzeti számítógép dolgozik, melyek kidolgozzák az űrhajó 28 navigációs rakétájának a működtetését, mikor melyiket és mennyi időre kell beindítani. Az ATV másodpercenként kalibrálja újra GPS információit és programozza át a rakétákat, ha arra szükség van.
Amikor a szállítójármű már csak 250 méterre van az állomástól, teljesen egy vonalba kell kerülnie a Zvezda modullal, ekkor veti be a Jules Verne radarhoz hasonló lézeres mérőrendszerét. Az űrjármű rövid lézerimpulzusokat küld a dokkoló port körül elhelyezett fényvisszaverő pontokra, a visszavert fényt pedig kameráival rögzíti. Az impulzus kibocsátása és a fény visszaérkezése között eltelt időből határozható meg az ATV és a Zvezda közötti távolság, illetve a visszaérkező fényből azt is megállapítja a számítógépes rendszer, hogy milyen szögben áll a jármű az állomáshoz viszonyítva.
A biztonság kedvéért az égen látható csillagképekről is felvételeket készít, amit csillagtérképeivel összehasonlít, kiszámítva a csillagokhoz, valamint az űrállomáshoz viszonyított orientációját. Végül, amikor már csak 12 méterre van az ISS-től, az ATV "megszigonyozza" az állomást, azaz egy kábelt lő ki a Zvezda egyik csatlakozási pontjába, majd elkezdi felcsévélni magát, a bedokkolást enyhe zökkenés jelzi majd, ami erejét tekintve egy apró parkolói koccanással lesz egyenértékű, magyarázta Franco Bonacina, az ESA francia munkatársa.
A dokkolás mellett szoftver vezérli az ATV nappaneljeit is, fűtő- és hűtőrendszereit és a komponensek közötti energia felosztást. Az emberi beavatkozás csak annyiban nyilvánul meg, hogy leállíthatják a dokkolási műveletet, ha valami végleg balul sülne el, és biztonságos parkoló pályára állíthatják a rendszert, ahol letesztelhetik, illetve kijavíthatják a hibákat és folytathatják a küldetést, vagy visszahozhatják a járművet a légkörbe. Ezeket a műveleteket is a szoftver végzi el, az emberek csupán utasításokat adhatnak, melyek aktiválják az előre betáplált programokat.
Az ATV kiürítése után az ISS lakói átpakolják az állomáson keletkezett hulladékot a Jules Vernébe, majd visszaküldik a Földre, ahol a légkörbe belépve elég. A következő ATV-k már hőpajzsokkal is fel lesznek szerelve, így az űrhajó jelentős része újrahasznosíthatóvá válik, és mivel az ATV koncpció emberek szállítására is alkalmas, gyakorlatilag ilyen téren is kiválthatja az űrsiklót, bár irányítását továbbra is számítógép végzi majd, az űrhajósok tehát csak utasok lennének.
Az automatikus rendszer az ESA szerint ideális a bolygókutatáshoz vagy a mélyűr expedíciókhoz, ahol sokáig tarthat, míg a kommunikációs jelek megteszik az űrhajó és az anyabolygó között tátongó távolságot. A jelenlegi rendszerek, mint például a MER marsjárók, hosszú időszakokat töltenek tétlenül, várva a földi jeleket, azonban ha ilyen mérvű automatizmussal szerelnék fel őket, nem kellene jelentős földi irányítási erőforrásokat mozgósítani, nyilatkozott Adam Baker, a Surrey Satellite Technologies specialistája.
A Jules Verne legnagyobb hatása a várakozásokkal ellentétben nem műszaki, vagy tudományos, hanem politikai lehet. Az ambiciózus projekt sikere arra sarkallhatja a NASA-t és vele együtt az Egyesült Államokat, hogy egyenlőbben ossza el a felelősségeket és kötelezettségeket a nemzetközi űrügynökségek között. "Ez felbátoríthatná, (vagy rákényszeríthetné) Amerikát, hogy visszavonuljon többségi pozíciójából" - tette hozzá Tim Stevenson, a Leicester Egyetem Űrkutatási Központjának főmérnöke.