SG.hu·
Gondolatokkal vezérelt robotkéz
Az agy hullámai által irányítható robotkezet mutattak be Japánban, mely két fejlesztési irányvonalnak is jelentős lökést adhat.
A kiotói ATR Agytudományi Laboratórium és a Honda Kutató Intézete által kifejlesztett rendszer egyszerre két irányvonalnak is jelentős lökést adhat, a művégtagok és a kizárólag gondolati úton működtetett számítógépek esetében is mérföldkőként értékelik. A két intézet fejlesztése egy új agy-gép interfész alapjául szolgálhat.
A Yukiyasu Kamitani vezetésével kifejlesztett technika a valós idejű funkcionális mágneses rezonancia alapú képalkotáson (fMRI) alapul. Az fMRI az agyon belüli tevékenységet vizsgálja a különböző agyterületek véráramlásának nyomon követésével. Mindehhez egy rádiófrekvencia impulzusokkal kombinált erős mágneses mezőt használ, így szondázza a testszövetekben található vízmolekulák hidrogén atomjainak mágneses állapotát.
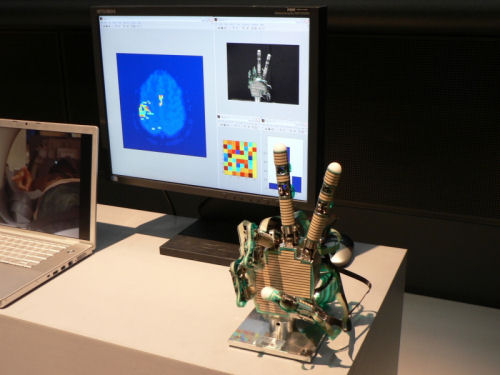
A kísérletek során az alanyokat befektették egy MRI letapogatóba, majd megkérték őket, hogy játsszanak "kő, papír, ollót" jobb kezükkel. A mozgás hatására az MRI letapogató rögzítette az agytevékenységet, az adatokat pedig egy számítógéphez továbbította, ami egy rövid tanulási periódust követően képessé vált a kéz által bemutatott alakzatokat a beérkező agyhullámokkal társítani, majd ennek megfelelően parancsot adni a robotkéznek a mozdulatsor elvégzésére. A Honda kutatói az interfészt robotjuk, ASIMO gondolati úton történő vezérlésére szeretnék használni, nyilatkozta a cég kutatás-fejlesztési részlegének igazgatója, Tomohiko Kawanabe az ázsiai Tech On!-nak.

A fenti módszer azon túl hogy helyhez kötött, lassú is, mivel a jelenlegi fMRI technikának 5 másodpercre van szüksége a letapogatáshoz és az adatok továbbításához. Ehhez további 2 másodperc társul a számítógép részéről, mire elemzi, feldolgozza és a kézhez továbbítja a jeleket, ezért alternatívaként a kutatók felvázoltak egy másik módszert is. A mágnesesség helyett az elektromosság lenne a rendszer kulcsa, azaz elektródák alkalmazásával az agy elektromos tevékenységét mérnék. Az elektródák a végtagi sérülésekkel élők esetében beültethetők lennének az agyszövetekbe, míg a gondolat irányított számítógépeknél elegendő lenne a fejbőrhöz csatlakoztatni.
Mindkét technikára akadnak alkalmazásbeli példák. Korábban amerikai kutatók már sikerrel alkalmaztak implantátumokat, melyekkel a kísérletben résztvevő majmok képesek voltak robotkarok távirányítására, illetve koponyára erősített elektródákkal is sikerült már egy kurzor mozgatását kivitelezni. Az fMRI előnye, hogy jóval nagyobb felbontásra képes elektromos társánál, hátránya, hogy költséges és jelenleg helyhez kötött, adott hangot kételyeinek a New Scientist hasábjain Klaus Robert Müller, a berlini Frauenhofer Intézet munkatársa, aki maga is ilyen rendszerek fejlesztésén dolgozik.
Ugyanakkor a japán kutatók meggyőződése, hogy a megvalósítás a jövőre nézve az fMRI-ben rejlik. Kamitami szerint egy napon a robotkéz ezzel a technikával képes lesz gyorsabban reagálni az emberinél, azt azonban ő is elismeri, hogy jelenleg túl sok a hátránya a mágneses letapogatásnak ahhoz, hogy hatékonyan használhassák. Az általa megálmodott eredményekhez óriási fejlődésnek kellene végbemenni az fMRI-nél, hogy a rendszert a gyakorlatban is alkalmazhassák és tovább fejleszthessék, ami vonatkozik mind a letapogató hardverre, mind a hozzá kapcsolódó implantátumokra.
A kiotói ATR Agytudományi Laboratórium és a Honda Kutató Intézete által kifejlesztett rendszer egyszerre két irányvonalnak is jelentős lökést adhat, a művégtagok és a kizárólag gondolati úton működtetett számítógépek esetében is mérföldkőként értékelik. A két intézet fejlesztése egy új agy-gép interfész alapjául szolgálhat.
A Yukiyasu Kamitani vezetésével kifejlesztett technika a valós idejű funkcionális mágneses rezonancia alapú képalkotáson (fMRI) alapul. Az fMRI az agyon belüli tevékenységet vizsgálja a különböző agyterületek véráramlásának nyomon követésével. Mindehhez egy rádiófrekvencia impulzusokkal kombinált erős mágneses mezőt használ, így szondázza a testszövetekben található vízmolekulák hidrogén atomjainak mágneses állapotát.
A kísérletek során az alanyokat befektették egy MRI letapogatóba, majd megkérték őket, hogy játsszanak "kő, papír, ollót" jobb kezükkel. A mozgás hatására az MRI letapogató rögzítette az agytevékenységet, az adatokat pedig egy számítógéphez továbbította, ami egy rövid tanulási periódust követően képessé vált a kéz által bemutatott alakzatokat a beérkező agyhullámokkal társítani, majd ennek megfelelően parancsot adni a robotkéznek a mozdulatsor elvégzésére. A Honda kutatói az interfészt robotjuk, ASIMO gondolati úton történő vezérlésére szeretnék használni, nyilatkozta a cég kutatás-fejlesztési részlegének igazgatója, Tomohiko Kawanabe az ázsiai Tech On!-nak.
A fenti módszer azon túl hogy helyhez kötött, lassú is, mivel a jelenlegi fMRI technikának 5 másodpercre van szüksége a letapogatáshoz és az adatok továbbításához. Ehhez további 2 másodperc társul a számítógép részéről, mire elemzi, feldolgozza és a kézhez továbbítja a jeleket, ezért alternatívaként a kutatók felvázoltak egy másik módszert is. A mágnesesség helyett az elektromosság lenne a rendszer kulcsa, azaz elektródák alkalmazásával az agy elektromos tevékenységét mérnék. Az elektródák a végtagi sérülésekkel élők esetében beültethetők lennének az agyszövetekbe, míg a gondolat irányított számítógépeknél elegendő lenne a fejbőrhöz csatlakoztatni.
Mindkét technikára akadnak alkalmazásbeli példák. Korábban amerikai kutatók már sikerrel alkalmaztak implantátumokat, melyekkel a kísérletben résztvevő majmok képesek voltak robotkarok távirányítására, illetve koponyára erősített elektródákkal is sikerült már egy kurzor mozgatását kivitelezni. Az fMRI előnye, hogy jóval nagyobb felbontásra képes elektromos társánál, hátránya, hogy költséges és jelenleg helyhez kötött, adott hangot kételyeinek a New Scientist hasábjain Klaus Robert Müller, a berlini Frauenhofer Intézet munkatársa, aki maga is ilyen rendszerek fejlesztésén dolgozik.
Ugyanakkor a japán kutatók meggyőződése, hogy a megvalósítás a jövőre nézve az fMRI-ben rejlik. Kamitami szerint egy napon a robotkéz ezzel a technikával képes lesz gyorsabban reagálni az emberinél, azt azonban ő is elismeri, hogy jelenleg túl sok a hátránya a mágneses letapogatásnak ahhoz, hogy hatékonyan használhassák. Az általa megálmodott eredményekhez óriási fejlődésnek kellene végbemenni az fMRI-nél, hogy a rendszert a gyakorlatban is alkalmazhassák és tovább fejleszthessék, ami vonatkozik mind a letapogató hardverre, mind a hozzá kapcsolódó implantátumokra.