SG.hu·
Fényszórókba integrálhatók a LiDAR- és a radarszenzorok

A különböző érzékelők így külső szemlélő számára észrevétlenül és helytakarékos módon helyezhetők el.
Az embereknek van szemük és fülük, amelyekkel felismerhetik a közúti közlekedésben előforduló kockázatos helyzeteket. Az autonóm vezetésű autókban szenzorok végzik ezt a feladatot. Az érzékelők növekvő száma azonban egyre több helyet igényel, ami általában ellentétes a tervezők kívánságával. A Fraunhofer Társaság munkatársai megtalálták a módját annak, hogy a szenzorok egy részét észrevétlenül integrálják úgy, hogy azokat az autók fényszóróiba építik be - a lámpák, a radar és a LiDAR-egység ötvözésével.
Ma már a járművek egyre több feladatot tudnak magukra vállalni: a sebességtartó automatika automatikusan tartja a távolságot az elöl haladó járműtől, a sávtartó asszisztens korrigálja az úttartást, az emberi vezető figyelmetlensége esetén pedig vészfékezés indul. Ezeket az utastérben (általában a visszapillantó mögött) elhelyezett kamerák és a hűtőrácsban elhelyezett radarok teszik lehetővé. A jövőben azonban a gépkocsi még több feladatot vállal majd, ehhez azonban drasztikusan meg kell növelni az érzékelősűrűséget. Az autótervezők körében nem túl népszerű a hűtőrács érzékelőkkel való beborításának ötlete.
Az Intelligens fényszóró nevű projektben a Fraunhofer Társaság öt intézete egyesítette az erőt, hogy a szenzorokat helytakarékos módon és a lehető legkevésbé feltűnően - a funkció és a teljesítmény sérelme nélkül - szereljék fel. A projekt célja egy olyan érzékelővel integrált fényszóró kifejlesztése a vezetőtámogató rendszerekhez, amelyben különböző érzékelő elemeket kombinálnak adaptív világítási rendszerekkel. Így az úttesten lévő tárgyakat, különösen a többi közlekedőt, például a gyalogosokat, a szenzorok még jobban felismerik. A LiDAR-érzékelőt elektronikus fékasszisztensekben vagy távolságtartó rendszerekben használják.
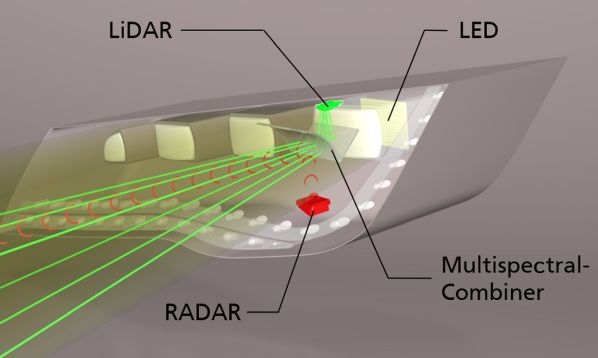
"Radar- és LiDAR-érzékelőket építünk a fényszórókba, amelyek optimális rálátást biztosítanak az optikai érzékelők és fényforrások számára, valamint szennyeződésmentességet" - nyilatkozta Tim Freialdenhoven, a Fraunhofer Társaság tudósa. A legfontosabb, hogy a Light Detection And Ranging (LiDAR) rendszert úgy kell megtervezni, hogy integrálható legyen az autóipari rendszerekbe. A fényszóróból az útra eső fényt nem befolyásolhatja a két további érzékelő - a fénykibocsátó LED-ek azonban a fényszóró leghátsó részén helyezkednek el. A szakemberek ezért a LiDAR-szenzorokat a fényszóróház tetején, a radarérzékelőket pedig alul helyezték el. Mindazonáltal mindkét rendszer sugarainak a LED-fénnyel azonos útvonalon kell haladniuk.
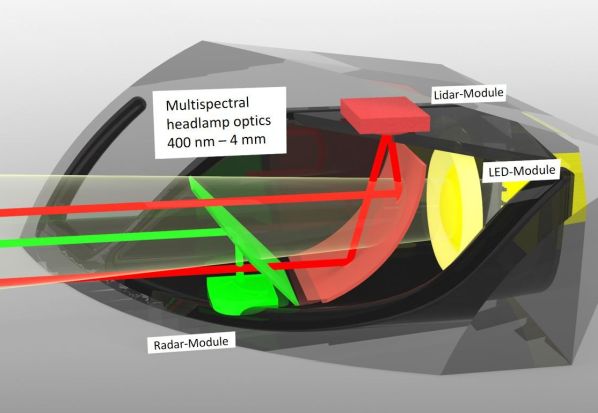
Ezt tovább bonyolítja az a tény, hogy minden sugár különböző hullámhosszú: a látható fényszóró fénye 400 és 750 nanométer közötti tartományban van, míg az infravörös LiDAR-sugarak 860 és 1550 nanométer között, tehát meglehetősen közel van a látható tartományhoz. A radarsugarak hullámhossza viszont négy milliméter. "Ezt a három hullámhosszt koaxiálisan - azaz egyenlő tengelyben - kell kombinálni, így beszélünk multispektrális kombinátorról" - hangsúlyozta Freialdenhoven. A koaxiális sugárirányítás fontos a parallaxis hiba elkerülése érdekében, amelyet először bonyolult módon kell kiszámítani. Ráadásul a szenzorok egymás melletti elhelyezése lényegesen több helyet foglalna el, mint a koaxiális elrendezés.
A kutatók ezt a problémát úgynevezett bi-kombinátorokkal oldják meg: a LED-fény és a LiDAR-fény kombinálásához egy speciálisan bevont dikroikus tükröt használnak, amellyel mindkét sugárnyalábot egy hullámhossz-specifikus visszaverődéssel egy tengelyre vezeti. Ugyanez történik a második kombinátornál is, ahol a LED-fényt, a LiDAR-fényt és a radart kombinálják, bár ez nem olyan bonyolult a nagyon különböző hullámhosszok miatt. Mivel a radarérzékelőket már széles körben használják az autóiparban, a bi-kombinátort úgy kell megtervezni, hogy a gyártók a meglévő érzékelőket kiigazítás nélkül tovább használhassák.
De joggal merül fel a kérdés, hogy miért érdemes egyáltalán kombinálni az optikai rendszereket, a LiDAR-t és a radart? "Minden egyes rendszernek megvannak az erősségei, de a gyengeségei is" - taglalta Freialdenhoven. Az optikai rendszerek ködben és poros úton, azaz optikailag rossz látási viszonyok között elérik határaikat. A radarrendszerek viszont szinte akadálytalanul látnak át a sűrű ködön. Az osztályozási képességük azonban nem túl magas: a radar felismeri, hogy emberről vagy fáról van-e szó, de meg sem közelíti a LiDAR osztályozási képességét. "Dolgozunk a radar és a LiDAR adatainak egyesítésén is, ami rendkívüli hozzáadott értéket kínál, a megbízhatóság szempontjából" - fejtette ki a szakember. A szabadalmat már be is nyújtották, és a csapat jelenleg egy prototípus megépítésén dolgozik.
A technológia jelentősen bővíti a vezetőtámogató rendszerek érzékelőinek integrálási lehetőségeit. A kisebb fénymodulok, a kompaktabb LiDAR- és az integrált radarérzékelők lehetővé teszik a többérzékelős koncepciók megvalósítását, különösen a növekvő tervezési követelményekkel és korlátozott beépítési hellyel rendelkező autonóm vezetés esetében. Így a jövőben az autonóm rendszerek nemcsak felismerik majd a személyt, hanem elemzik a sebességét, a távolságát és azt is, hogy milyen szögben áll az autóhoz képest.
Az embereknek van szemük és fülük, amelyekkel felismerhetik a közúti közlekedésben előforduló kockázatos helyzeteket. Az autonóm vezetésű autókban szenzorok végzik ezt a feladatot. Az érzékelők növekvő száma azonban egyre több helyet igényel, ami általában ellentétes a tervezők kívánságával. A Fraunhofer Társaság munkatársai megtalálták a módját annak, hogy a szenzorok egy részét észrevétlenül integrálják úgy, hogy azokat az autók fényszóróiba építik be - a lámpák, a radar és a LiDAR-egység ötvözésével.
Ma már a járművek egyre több feladatot tudnak magukra vállalni: a sebességtartó automatika automatikusan tartja a távolságot az elöl haladó járműtől, a sávtartó asszisztens korrigálja az úttartást, az emberi vezető figyelmetlensége esetén pedig vészfékezés indul. Ezeket az utastérben (általában a visszapillantó mögött) elhelyezett kamerák és a hűtőrácsban elhelyezett radarok teszik lehetővé. A jövőben azonban a gépkocsi még több feladatot vállal majd, ehhez azonban drasztikusan meg kell növelni az érzékelősűrűséget. Az autótervezők körében nem túl népszerű a hűtőrács érzékelőkkel való beborításának ötlete.
Az Intelligens fényszóró nevű projektben a Fraunhofer Társaság öt intézete egyesítette az erőt, hogy a szenzorokat helytakarékos módon és a lehető legkevésbé feltűnően - a funkció és a teljesítmény sérelme nélkül - szereljék fel. A projekt célja egy olyan érzékelővel integrált fényszóró kifejlesztése a vezetőtámogató rendszerekhez, amelyben különböző érzékelő elemeket kombinálnak adaptív világítási rendszerekkel. Így az úttesten lévő tárgyakat, különösen a többi közlekedőt, például a gyalogosokat, a szenzorok még jobban felismerik. A LiDAR-érzékelőt elektronikus fékasszisztensekben vagy távolságtartó rendszerekben használják.
"Radar- és LiDAR-érzékelőket építünk a fényszórókba, amelyek optimális rálátást biztosítanak az optikai érzékelők és fényforrások számára, valamint szennyeződésmentességet" - nyilatkozta Tim Freialdenhoven, a Fraunhofer Társaság tudósa. A legfontosabb, hogy a Light Detection And Ranging (LiDAR) rendszert úgy kell megtervezni, hogy integrálható legyen az autóipari rendszerekbe. A fényszóróból az útra eső fényt nem befolyásolhatja a két további érzékelő - a fénykibocsátó LED-ek azonban a fényszóró leghátsó részén helyezkednek el. A szakemberek ezért a LiDAR-szenzorokat a fényszóróház tetején, a radarérzékelőket pedig alul helyezték el. Mindazonáltal mindkét rendszer sugarainak a LED-fénnyel azonos útvonalon kell haladniuk.
Ezt tovább bonyolítja az a tény, hogy minden sugár különböző hullámhosszú: a látható fényszóró fénye 400 és 750 nanométer közötti tartományban van, míg az infravörös LiDAR-sugarak 860 és 1550 nanométer között, tehát meglehetősen közel van a látható tartományhoz. A radarsugarak hullámhossza viszont négy milliméter. "Ezt a három hullámhosszt koaxiálisan - azaz egyenlő tengelyben - kell kombinálni, így beszélünk multispektrális kombinátorról" - hangsúlyozta Freialdenhoven. A koaxiális sugárirányítás fontos a parallaxis hiba elkerülése érdekében, amelyet először bonyolult módon kell kiszámítani. Ráadásul a szenzorok egymás melletti elhelyezése lényegesen több helyet foglalna el, mint a koaxiális elrendezés.
A kutatók ezt a problémát úgynevezett bi-kombinátorokkal oldják meg: a LED-fény és a LiDAR-fény kombinálásához egy speciálisan bevont dikroikus tükröt használnak, amellyel mindkét sugárnyalábot egy hullámhossz-specifikus visszaverődéssel egy tengelyre vezeti. Ugyanez történik a második kombinátornál is, ahol a LED-fényt, a LiDAR-fényt és a radart kombinálják, bár ez nem olyan bonyolult a nagyon különböző hullámhosszok miatt. Mivel a radarérzékelőket már széles körben használják az autóiparban, a bi-kombinátort úgy kell megtervezni, hogy a gyártók a meglévő érzékelőket kiigazítás nélkül tovább használhassák.
De joggal merül fel a kérdés, hogy miért érdemes egyáltalán kombinálni az optikai rendszereket, a LiDAR-t és a radart? "Minden egyes rendszernek megvannak az erősségei, de a gyengeségei is" - taglalta Freialdenhoven. Az optikai rendszerek ködben és poros úton, azaz optikailag rossz látási viszonyok között elérik határaikat. A radarrendszerek viszont szinte akadálytalanul látnak át a sűrű ködön. Az osztályozási képességük azonban nem túl magas: a radar felismeri, hogy emberről vagy fáról van-e szó, de meg sem közelíti a LiDAR osztályozási képességét. "Dolgozunk a radar és a LiDAR adatainak egyesítésén is, ami rendkívüli hozzáadott értéket kínál, a megbízhatóság szempontjából" - fejtette ki a szakember. A szabadalmat már be is nyújtották, és a csapat jelenleg egy prototípus megépítésén dolgozik.
A technológia jelentősen bővíti a vezetőtámogató rendszerek érzékelőinek integrálási lehetőségeit. A kisebb fénymodulok, a kompaktabb LiDAR- és az integrált radarérzékelők lehetővé teszik a többérzékelős koncepciók megvalósítását, különösen a növekvő tervezési követelményekkel és korlátozott beépítési hellyel rendelkező autonóm vezetés esetében. Így a jövőben az autonóm rendszerek nemcsak felismerik majd a személyt, hanem elemzik a sebességét, a távolságát és azt is, hogy milyen szögben áll az autóhoz képest.