SG.hu·
Szoftver segíthet a járműveknek az önálló navigációban

Egy startup azon dolgozik, hogy az autók úgy lássanak, mintha emberek lennének. Szoftverük dinamikus 3D térképet alkot GPS használata nélkül.
Egy startup, az Artisense már teszteli saját technológiáját, amellyel szabványt akar kialakítani az ágazaton belül. A kifejlesztett szoftver kifinomult algoritmusok segítségével teljesen újszerű 3D-térképeket készít el viszonylag kis erőfeszítés árán. Összetett és fotorealisztikus 3D-felvételek készítésére ugyanakkor nincs szükség, miként a drága hardverek alkalmazásáról is le lehet mondani. Till Kaestner, a vállalat társalapítója a mobilitás újragondolásában akar segíteni és a célja az, hogy a gépeket abba a helyzetbe hozzák, hogy úgy lássanak, mintha emberek lennének.
A kulcsszó a SLAM, az angol "simultaneous localization and mapping" rövidítése; ismeretlen környezetek feltérképezéséről van szó úgy, hogy közben a térképező "belül van", és az útvonalát is figyelemmel kisérik. A klasszikus csirke vagy a tojás volt előbb problémához hasonló kérdés megoldására számtalan algoritmus készült, a startup egy ilyet dolgozott bele egy eszközbe, és így képes a navigációra használható minőségi szintet elérni. A pontfelhő GPS-nélküli létrehozásában az időmérés és az útvonal nagyon pontos ismerete a kulcs, amit gépi tanulás javít fel gyenge fényviszonyok között. De az igazi előny, hogy a kis méret miatt a térképcsomagok és a helyadatok a járművek és az infrastruktúra között valós időben megoszthatók.
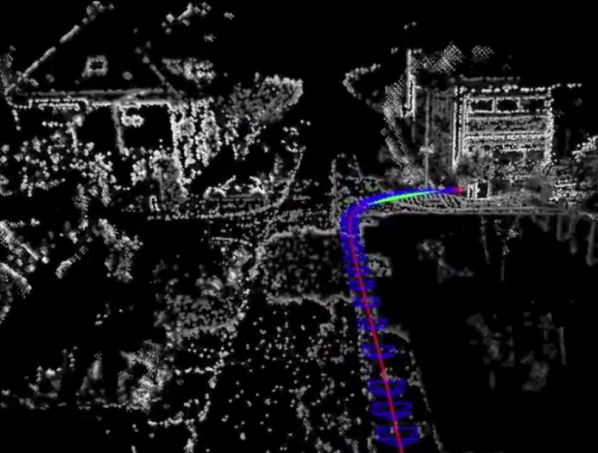
Ilyen pontfelhőt generálnak a legfelső képen lévő egyszerű kamerák
A cég szoftvere az egyes utak során különböző pontokból 3D-utcaképet hoz létre. A folyamathoz tehát nincs szükség GPS-jelekre vagy drága szenzorokra, például LiDAR-rendszerekre és az egész művelet megvalósítható hagyományos számítógépekkel is. A mesterséges intelligencia lehetővé teszi a dinamikus 3D-térképek megalkotását és a pozíciók valós időben való meghatározását. Az Artisense viszonylag egyszerű hardvereket használ, amelyek elvileg bármely autóba integrálhatók, ráadásul Kaestner szerint sokkal olcsóbbak is. A szakember közölte, hogy a Google által először utcára küldött szenzoros gépkocsik még egymillió dollárba kerültek. Az ő hardverük viszont minden egyes járműhöz hozzáigazítható és jelenleg százszor olcsóbb.
A rendszer szíve a szoftver és a mesterséges intelligencia. Az utóbbi teszi lehetővé a valósághű és a számítógép által is olvasható környezeti 3D-modellek létrehozását. A kaliforniai startup gépkocsijai január óta közlekednek a berlini utakon. A 3D-térkép készítése márciusra zárulhat le. Kaestner leszögezte, hogy nagyon elégedett a projektjükkel és a járműveik naponta 400 kilométert tesznek meg. A műszaki rendszereik robusztusak, míg a szenzoradatok és a 3D-rekonstrukciók minősége biztató. Most már minden csak azon múlik, hogy Berlin feltérképezését teljesen megvalósítsák és a szenzoradatok segítségével tovább dolgozzanak a konkrét alkalmazási lehetőségeken.
A berlini tesztprojektben a Német Vasút, a Siemens, a Bombardier és az Alba nevű újrahasznosítással foglalkozó vállalat vesznek részt. A Bombardier a biztonságos vasúti rendszereket akarja továbbfejleszteni, továbbá jobb akadály- és veszélyfelismerő megoldást, illetve egy a vezetőket öntanulóan segítő rendszert hozna létre. Carla Eysel, az Alba digitális szakértője pedig kifejtette, hogy ők azt szeretnék, hogy a köztisztasági autóik biztonságosan navigáljanak.
Egy startup, az Artisense már teszteli saját technológiáját, amellyel szabványt akar kialakítani az ágazaton belül. A kifejlesztett szoftver kifinomult algoritmusok segítségével teljesen újszerű 3D-térképeket készít el viszonylag kis erőfeszítés árán. Összetett és fotorealisztikus 3D-felvételek készítésére ugyanakkor nincs szükség, miként a drága hardverek alkalmazásáról is le lehet mondani. Till Kaestner, a vállalat társalapítója a mobilitás újragondolásában akar segíteni és a célja az, hogy a gépeket abba a helyzetbe hozzák, hogy úgy lássanak, mintha emberek lennének.
A kulcsszó a SLAM, az angol "simultaneous localization and mapping" rövidítése; ismeretlen környezetek feltérképezéséről van szó úgy, hogy közben a térképező "belül van", és az útvonalát is figyelemmel kisérik. A klasszikus csirke vagy a tojás volt előbb problémához hasonló kérdés megoldására számtalan algoritmus készült, a startup egy ilyet dolgozott bele egy eszközbe, és így képes a navigációra használható minőségi szintet elérni. A pontfelhő GPS-nélküli létrehozásában az időmérés és az útvonal nagyon pontos ismerete a kulcs, amit gépi tanulás javít fel gyenge fényviszonyok között. De az igazi előny, hogy a kis méret miatt a térképcsomagok és a helyadatok a járművek és az infrastruktúra között valós időben megoszthatók.
Ilyen pontfelhőt generálnak a legfelső képen lévő egyszerű kamerák
A cég szoftvere az egyes utak során különböző pontokból 3D-utcaképet hoz létre. A folyamathoz tehát nincs szükség GPS-jelekre vagy drága szenzorokra, például LiDAR-rendszerekre és az egész művelet megvalósítható hagyományos számítógépekkel is. A mesterséges intelligencia lehetővé teszi a dinamikus 3D-térképek megalkotását és a pozíciók valós időben való meghatározását. Az Artisense viszonylag egyszerű hardvereket használ, amelyek elvileg bármely autóba integrálhatók, ráadásul Kaestner szerint sokkal olcsóbbak is. A szakember közölte, hogy a Google által először utcára küldött szenzoros gépkocsik még egymillió dollárba kerültek. Az ő hardverük viszont minden egyes járműhöz hozzáigazítható és jelenleg százszor olcsóbb.
A rendszer szíve a szoftver és a mesterséges intelligencia. Az utóbbi teszi lehetővé a valósághű és a számítógép által is olvasható környezeti 3D-modellek létrehozását. A kaliforniai startup gépkocsijai január óta közlekednek a berlini utakon. A 3D-térkép készítése márciusra zárulhat le. Kaestner leszögezte, hogy nagyon elégedett a projektjükkel és a járműveik naponta 400 kilométert tesznek meg. A műszaki rendszereik robusztusak, míg a szenzoradatok és a 3D-rekonstrukciók minősége biztató. Most már minden csak azon múlik, hogy Berlin feltérképezését teljesen megvalósítsák és a szenzoradatok segítségével tovább dolgozzanak a konkrét alkalmazási lehetőségeken.
A berlini tesztprojektben a Német Vasút, a Siemens, a Bombardier és az Alba nevű újrahasznosítással foglalkozó vállalat vesznek részt. A Bombardier a biztonságos vasúti rendszereket akarja továbbfejleszteni, továbbá jobb akadály- és veszélyfelismerő megoldást, illetve egy a vezetőket öntanulóan segítő rendszert hozna létre. Carla Eysel, az Alba digitális szakértője pedig kifejtette, hogy ők azt szeretnék, hogy a köztisztasági autóik biztonságosan navigáljanak.