SG.hu·
Emberi járás robot módra
Daan Hobbelen egy új, rendkívül fejlett sétáló robotot fejlesztett ki a holland Delft Műszaki Egyetemen. Kutatása azon túl, hogy doktori címet ér számára, betekintést nyújt az emberi járás komplexitásába és fokozhatja a kétlábú robotok hatékonyságát.
A séta számunkra nem tűnik különösebb feladatnak, ha viszont egy robottal próbáljuk elsajátíttatni, akkor rá kell döbbeni, milyen összetett ez a tevékenység. Sétáló robotok az 1970-es évek óta léteznek, a működésükhöz alkalmazott stratégia nagyjából két típusra osztható. Az első az ipari robotok világából származik, ahol minden rutinokba van rögzítve. Ez a megközelítés elegendő idő és nem utolsósorban pénz rendelkezésére állása esetén rendkívüli eredményeket hozhat, de vannak súlyos korlátai is, ami a költségeit, energiafelhasználását és rugalmasságát illeti.
A Delft Egyetem a másik módozatban játszik úttörő szerepet, ami az emberek járásának vizsgálataiból származó eredményeket igyekszik átültetni a robotok világába. A robotok mozgása eleinte a kontrollált előre zuhanáshoz hasonlít, ezzel a módszerrel azonban megszabadulhatunk óvatos, merev járástól és egy folytonosabb, energia hatékony mozgást kapunk, ami az embereket is jellemzi.
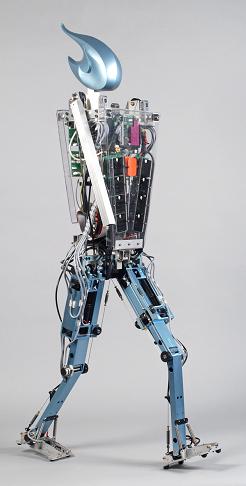 Hobbelen első alkalommal demonstrálta, hogy egy robot egyszerre lehet energiahatékony és rendkívül stabil. Az áttörést az emberi járás stabilitásának új, az eddigieknél hatékonyabb mérési módszerével sikerült elérnie. A módszer kidolgozása után egy robot építésébe fogott, amivel demonstrálni lehetett a teljesítményjavulást, ez lett a Flame elnevezésű kétlábú gépezet, ami hét motort, egy egyensúlyozó rendszert és számos stabilizálást szolgáló algoritmust kapott. A robot például képes az egyensúlyozó rendszertől kapott információkat felhasználva lábait kicsit nagyobb távolságba pozícionálni egymástól, így kerülve el egy potenciális esést. Hobbelen szerint Flame a világ legfejlettebb sétáló robotja, legalábbis azon robotok kategóriájában, amik alapelvként az emberi járásmódot alkalmazzák.
Hobbelen első alkalommal demonstrálta, hogy egy robot egyszerre lehet energiahatékony és rendkívül stabil. Az áttörést az emberi járás stabilitásának új, az eddigieknél hatékonyabb mérési módszerével sikerült elérnie. A módszer kidolgozása után egy robot építésébe fogott, amivel demonstrálni lehetett a teljesítményjavulást, ez lett a Flame elnevezésű kétlábú gépezet, ami hét motort, egy egyensúlyozó rendszert és számos stabilizálást szolgáló algoritmust kapott. A robot például képes az egyensúlyozó rendszertől kapott információkat felhasználva lábait kicsit nagyobb távolságba pozícionálni egymástól, így kerülve el egy potenciális esést. Hobbelen szerint Flame a világ legfejlettebb sétáló robotja, legalábbis azon robotok kategóriájában, amik alapelvként az emberi járásmódot alkalmazzák.
Flame ízületeit, nyílirányban két bokaízületet, két térdízületet, két csípőízületet, valamint oldalirányban egy csípőízületet elektromos aktuátorok mozgatják. Az oldalirányú csípőízület a láb oldalra történő mozgását teszi lehetővé. A nyílirányú sík összes mozgatott ízülete rugalmas elemek sorából épül fel, lehetővé téve a nyomatékvezérlést. Az aktuátorok mellett minden ízület pozíció érzékelőkkel van ellátva, melyek mérik az ízület hajlási szögeit és közvetve a rugalmas elemek megnyúlását. A felsőtest elsősorban a robot elektronikáját hordozza. Itt található egy PC104 számítógép, amin egy valósidejű Linux kernel (RTA1) fut, valamint a többi mozgató elektronika. Összességében Flame megközelítőleg 1,3 méter magas, amihez 15 kilogramm súly társul. Járási sebessége másodpercenként 0,45 méter körül mozog.
A sétálás folyamatának modellezésével a kutatók a robottechnika fejlesztésén túl a járási nehézségekkel küzdő embereknek is segítséget nyújthatnak, javítva a diagnózisok felállítását, valamint az edző- és rehabilitációs berendezések hatékonyságát.
Az elkövetkező években a Delft csapata nagy előrelépéseket akar tenni a sétáló robotok kutatása terén, robotjaik képesek lesznek a tanulni, látni és futni. A kutatási program egyik része a labdarúgásra összpontosul. Május 29-én a Twente és az Eindhoven Egyetemmel, valamint a Philips elektronikai óriással a Delft Egyetem fogja bemutatni a holland RoboCup csapatot, ami nyáron Kínában részt vesz a 2008 RoboCup Soccer bajnokságon. A bemutató a Dynamic Walking 2008 konferencia egyik eseménye lesz, ahol biomechanikai szakértők, mozgástudósok és robot szakértők gyűlnek össze a járási folyamatról szerzett tapasztalataik megvitatására.
A séta számunkra nem tűnik különösebb feladatnak, ha viszont egy robottal próbáljuk elsajátíttatni, akkor rá kell döbbeni, milyen összetett ez a tevékenység. Sétáló robotok az 1970-es évek óta léteznek, a működésükhöz alkalmazott stratégia nagyjából két típusra osztható. Az első az ipari robotok világából származik, ahol minden rutinokba van rögzítve. Ez a megközelítés elegendő idő és nem utolsósorban pénz rendelkezésére állása esetén rendkívüli eredményeket hozhat, de vannak súlyos korlátai is, ami a költségeit, energiafelhasználását és rugalmasságát illeti.
A Delft Egyetem a másik módozatban játszik úttörő szerepet, ami az emberek járásának vizsgálataiból származó eredményeket igyekszik átültetni a robotok világába. A robotok mozgása eleinte a kontrollált előre zuhanáshoz hasonlít, ezzel a módszerrel azonban megszabadulhatunk óvatos, merev járástól és egy folytonosabb, energia hatékony mozgást kapunk, ami az embereket is jellemzi.
Hobbelen első alkalommal demonstrálta, hogy egy robot egyszerre lehet energiahatékony és rendkívül stabil. Az áttörést az emberi járás stabilitásának új, az eddigieknél hatékonyabb mérési módszerével sikerült elérnie. A módszer kidolgozása után egy robot építésébe fogott, amivel demonstrálni lehetett a teljesítményjavulást, ez lett a Flame elnevezésű kétlábú gépezet, ami hét motort, egy egyensúlyozó rendszert és számos stabilizálást szolgáló algoritmust kapott. A robot például képes az egyensúlyozó rendszertől kapott információkat felhasználva lábait kicsit nagyobb távolságba pozícionálni egymástól, így kerülve el egy potenciális esést. Hobbelen szerint Flame a világ legfejlettebb sétáló robotja, legalábbis azon robotok kategóriájában, amik alapelvként az emberi járásmódot alkalmazzák.Flame ízületeit, nyílirányban két bokaízületet, két térdízületet, két csípőízületet, valamint oldalirányban egy csípőízületet elektromos aktuátorok mozgatják. Az oldalirányú csípőízület a láb oldalra történő mozgását teszi lehetővé. A nyílirányú sík összes mozgatott ízülete rugalmas elemek sorából épül fel, lehetővé téve a nyomatékvezérlést. Az aktuátorok mellett minden ízület pozíció érzékelőkkel van ellátva, melyek mérik az ízület hajlási szögeit és közvetve a rugalmas elemek megnyúlását. A felsőtest elsősorban a robot elektronikáját hordozza. Itt található egy PC104 számítógép, amin egy valósidejű Linux kernel (RTA1) fut, valamint a többi mozgató elektronika. Összességében Flame megközelítőleg 1,3 méter magas, amihez 15 kilogramm súly társul. Járási sebessége másodpercenként 0,45 méter körül mozog.
A sétálás folyamatának modellezésével a kutatók a robottechnika fejlesztésén túl a járási nehézségekkel küzdő embereknek is segítséget nyújthatnak, javítva a diagnózisok felállítását, valamint az edző- és rehabilitációs berendezések hatékonyságát.
Az elkövetkező években a Delft csapata nagy előrelépéseket akar tenni a sétáló robotok kutatása terén, robotjaik képesek lesznek a tanulni, látni és futni. A kutatási program egyik része a labdarúgásra összpontosul. Május 29-én a Twente és az Eindhoven Egyetemmel, valamint a Philips elektronikai óriással a Delft Egyetem fogja bemutatni a holland RoboCup csapatot, ami nyáron Kínában részt vesz a 2008 RoboCup Soccer bajnokságon. A bemutató a Dynamic Walking 2008 konferencia egyik eseménye lesz, ahol biomechanikai szakértők, mozgástudósok és robot szakértők gyűlnek össze a járási folyamatról szerzett tapasztalataik megvitatására.