SG.hu·
Dokkolás, leválás emberi segítség nélkül
Nagy lépést tett előre egy automatikus műholdjavító projekt, miután földkörüli pályán két kísérleti űrjármű automatikus szétválást, szoros formációban történő repülést és összekapcsolódást mutatott be.
A demonstráció az Egyesült Államok kormánya által felügyelt Orbital Express program része. A javítást végző ASTRO, valamint a javítandó műhold és üzemanyagtöltő állomás szerepét betöltő NextSat párosról már korábban beszámoltunk. Feladatuk a földkörüli pályán történő hajtóanyag feltöltés és a javítás demonstrálása, mellyel a műholdak üzemeltetői jelentősen megnyújthatják eszközeik élettartamát.
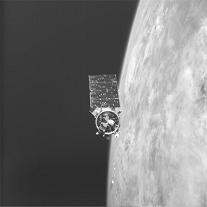 Szombaton először vált el egymástól a páros, addig az ASTRO robotkarja tartotta együtt őket. Az elválást követően egymástól mindössze 10 méteres távolságban repülve egy órán át haladtak pályájukon, majd az ASTRO megközelítette a NextSatot és hozzákapcsolódott.
Szombaton először vált el egymástól a páros, addig az ASTRO robotkarja tartotta együtt őket. Az elválást követően egymástól mindössze 10 méteres távolságban repülve egy órán át haladtak pályájukon, majd az ASTRO megközelítette a NextSatot és hozzákapcsolódott.
A 300 millió dolláros küldetést felügyelő Fejlett Védelmi Kutatási Projektek Ügynökségének (DARPA) jelentése szerint a műveletek döntő többsége alatt a két egység semmilyen kapcsolatban nem volt a földi irányítással. Az ASTRO kizárólag fedélzeti tájékozódási és navigációs műszerei alkalmazásával teljesítette a tesztet, a Földről semmilyen inputot nem kapott.
Ez volt a kilenc részből álló, egyre komplikáltabbá váló tesztsorozat harmadik felvonása. Az első teszten, április 13-án a hajtóanyag és egy akku átadását mutatta be a két egység. Az üzemanyag átadása kétirányú, mindkét egység képes a másikat feltölteni. A második teszten az ASTRO kanadai építésű robotkarjával megragadta a NextSatot és leválasztotta a 227 kilogramm súlyú műholdat az őket a március 8-i kilövésük óta összekötő rögzítő gyűrűről. A héten újabb üzemanyag átadási procedúrák várhatók, majd megkezdik a nagyobb távolságokról történő összekapcsolódási műveletek végrehajtását. A következő lépés a mostani hét végére várható, amikor az ASTRO és a NextSat újra elválva egymástól 30 méterre távolodva folytatják körözésüket.
 Újabb összekapcsolódás után megduplázzák az egységek közötti távolságot. A fő attrakció az lesz, amikor a két űreszköz 6 kilométeres távolságból közelíti meg egymást és kapcsolódik össze. A program vezetője, Paul Geery szerint a végső műveletet olyan lesz, mintha egy gombnyomással utasítanánk autónkat, hogy lavírozzon el a legközelebbi töltőállomásig, ahol a benzinkút magától feltölti a járművet, majd az magától visszaáll a garázsba.
Újabb összekapcsolódás után megduplázzák az egységek közötti távolságot. A fő attrakció az lesz, amikor a két űreszköz 6 kilométeres távolságból közelíti meg egymást és kapcsolódik össze. A program vezetője, Paul Geery szerint a végső műveletet olyan lesz, mintha egy gombnyomással utasítanánk autónkat, hogy lavírozzon el a legközelebbi töltőállomásig, ahol a benzinkút magától feltölti a járművet, majd az magától visszaáll a garázsba.
A demonstráció az Egyesült Államok kormánya által felügyelt Orbital Express program része. A javítást végző ASTRO, valamint a javítandó műhold és üzemanyagtöltő állomás szerepét betöltő NextSat párosról már korábban beszámoltunk. Feladatuk a földkörüli pályán történő hajtóanyag feltöltés és a javítás demonstrálása, mellyel a műholdak üzemeltetői jelentősen megnyújthatják eszközeik élettartamát.
Szombaton először vált el egymástól a páros, addig az ASTRO robotkarja tartotta együtt őket. Az elválást követően egymástól mindössze 10 méteres távolságban repülve egy órán át haladtak pályájukon, majd az ASTRO megközelítette a NextSatot és hozzákapcsolódott.A 300 millió dolláros küldetést felügyelő Fejlett Védelmi Kutatási Projektek Ügynökségének (DARPA) jelentése szerint a műveletek döntő többsége alatt a két egység semmilyen kapcsolatban nem volt a földi irányítással. Az ASTRO kizárólag fedélzeti tájékozódási és navigációs műszerei alkalmazásával teljesítette a tesztet, a Földről semmilyen inputot nem kapott.
Ez volt a kilenc részből álló, egyre komplikáltabbá váló tesztsorozat harmadik felvonása. Az első teszten, április 13-án a hajtóanyag és egy akku átadását mutatta be a két egység. Az üzemanyag átadása kétirányú, mindkét egység képes a másikat feltölteni. A második teszten az ASTRO kanadai építésű robotkarjával megragadta a NextSatot és leválasztotta a 227 kilogramm súlyú műholdat az őket a március 8-i kilövésük óta összekötő rögzítő gyűrűről. A héten újabb üzemanyag átadási procedúrák várhatók, majd megkezdik a nagyobb távolságokról történő összekapcsolódási műveletek végrehajtását. A következő lépés a mostani hét végére várható, amikor az ASTRO és a NextSat újra elválva egymástól 30 méterre távolodva folytatják körözésüket.
Újabb összekapcsolódás után megduplázzák az egységek közötti távolságot. A fő attrakció az lesz, amikor a két űreszköz 6 kilométeres távolságból közelíti meg egymást és kapcsolódik össze. A program vezetője, Paul Geery szerint a végső műveletet olyan lesz, mintha egy gombnyomással utasítanánk autónkat, hogy lavírozzon el a legközelebbi töltőállomásig, ahol a benzinkút magától feltölti a járművet, majd az magától visszaáll a garázsba.