SG.hu·
A hangyákat veszik alapul az első robotrajok
Minden eddiginél közelebb került egy kutató konzorcium olyan miniatűr robotrajok gyártásához, melyek úgy viselkednek, mint a hangyakolóniák.
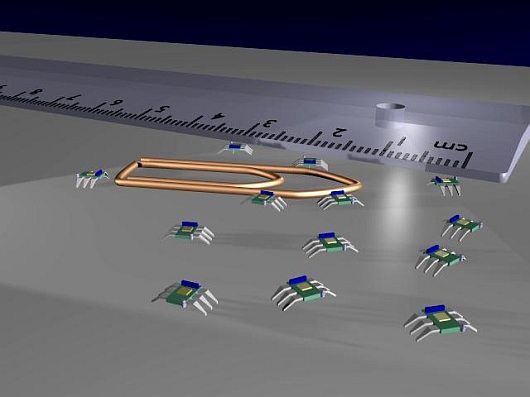
A hangyák nem csupán élelmet gyűjtenek, fészkeket építenek, különböző dolgokat mozgatnak és ellátják a királynőt és a lárvákat, mindezt vezető nélkül, de rendelkeznek annak a képességével is, hogy tevékenységeiket a környezet vagy a kolónia szükségleteihez igazítsák. A csapatokban dolgozó robotok ötlete nem újkeletű, azonban létezik egy új tervezet, ami néhány milliméteres robotok ezreit mozgósítaná, tömeggyártásukhoz pedig a számítógépes chip gyártási technikájából merítene ihletet.
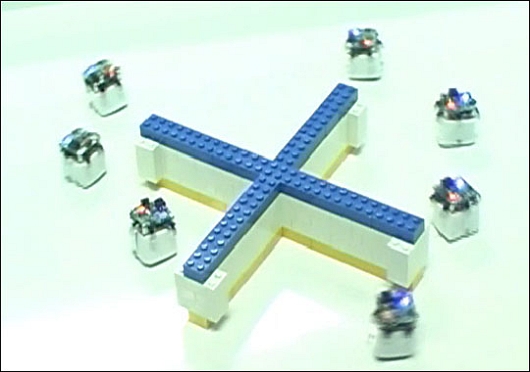
Az I-Swarm projekt egy napon rajok százait állíthatná szolgálatba a környezet figyelemmel kísérésére és érzékelésére, a csővezetékek, hajtóművek vagy turbinák átvizsgálására, vagy akár orvosi diagnosztikai mérések, illetve beavatkozások elvégzésére is az emberi testben. A projektben 10 kutatóintézet vesz részt, melyeket a német Karlsruhei Egyetem munkatársai, Jörg Seyfried és Heinz Woem koordinálnak. Seyfried és az I-Swarm csapat már megépített két, centiméterekben mérhető robotokból álló csoportot, melyek a Jasmine és Micron nevet kapták. Ezek a csoportok a rajok közötti kommunikáció tesztelésére szolgálnak. A természetben ez a kommunikáció általában közvetett.
A hangyák például megfigyelik a közelükben dolgozók tevékenységét és követhetik a többiek munkáját, vagy megváltoztathatják a környezetet úgy, hogy társaik olvashassanak belőle, például kémiai nyomokat hagynak maguk után. A Jasmine és Micron robotok infravörös jeleket használnak, hasonlót, mint amivel a távirányítók kommunikálnak az otthoni szórakoztató elektronikáinkkal.
Amikor egy robot egy objektumot észlel, jelez egy közeli társának, ami szintén jelzéseket küld a többieknek, egyfajta kommunikációs láncriadót hozva létre, ami arról tudósít, hogy egy akadályt lokalizáltak. Ezután a robotok az objektum köré sereglenek. Bár ezek a robotok kerekeken gördülnek Seyfeld elmondása szerint a végleges I-Swarm egyedek parányi belső rezgésekkel navigálják majd magukat, mint az asztalról lemászó rezgő mobiltelefon.
A rezgéshez egészen minimális energiára van szükség, amiből amúgy is szűkében lesznek, ezért valószínűleg a számítási képességeiket is le kell majd csökkenteni. A robotoknak tudni kell kommunikálniuk egymással, észlelni a környezetüket infravörös érzékelő vagy csápszerű antennák segítségével, sőt az sem kizárt hogy felvételeket fognak készíteni egy 10x10 pixel felbontású kamerával. Mindehhez összesen 10 kilobyte-nyi memóriával rendelkeznek.
Az I-Swarm konzorcium reményei szerint már jövőre be tudja mutatni az első milliméteres robotokat és 2008-ra több száz egység fog együtt dolgozni egy rovarkolónia szintjén.
Videó a robotokról
A hangyák nem csupán élelmet gyűjtenek, fészkeket építenek, különböző dolgokat mozgatnak és ellátják a királynőt és a lárvákat, mindezt vezető nélkül, de rendelkeznek annak a képességével is, hogy tevékenységeiket a környezet vagy a kolónia szükségleteihez igazítsák. A csapatokban dolgozó robotok ötlete nem újkeletű, azonban létezik egy új tervezet, ami néhány milliméteres robotok ezreit mozgósítaná, tömeggyártásukhoz pedig a számítógépes chip gyártási technikájából merítene ihletet.
Az I-Swarm projekt egy napon rajok százait állíthatná szolgálatba a környezet figyelemmel kísérésére és érzékelésére, a csővezetékek, hajtóművek vagy turbinák átvizsgálására, vagy akár orvosi diagnosztikai mérések, illetve beavatkozások elvégzésére is az emberi testben. A projektben 10 kutatóintézet vesz részt, melyeket a német Karlsruhei Egyetem munkatársai, Jörg Seyfried és Heinz Woem koordinálnak. Seyfried és az I-Swarm csapat már megépített két, centiméterekben mérhető robotokból álló csoportot, melyek a Jasmine és Micron nevet kapták. Ezek a csoportok a rajok közötti kommunikáció tesztelésére szolgálnak. A természetben ez a kommunikáció általában közvetett.
A hangyák például megfigyelik a közelükben dolgozók tevékenységét és követhetik a többiek munkáját, vagy megváltoztathatják a környezetet úgy, hogy társaik olvashassanak belőle, például kémiai nyomokat hagynak maguk után. A Jasmine és Micron robotok infravörös jeleket használnak, hasonlót, mint amivel a távirányítók kommunikálnak az otthoni szórakoztató elektronikáinkkal.
Amikor egy robot egy objektumot észlel, jelez egy közeli társának, ami szintén jelzéseket küld a többieknek, egyfajta kommunikációs láncriadót hozva létre, ami arról tudósít, hogy egy akadályt lokalizáltak. Ezután a robotok az objektum köré sereglenek. Bár ezek a robotok kerekeken gördülnek Seyfeld elmondása szerint a végleges I-Swarm egyedek parányi belső rezgésekkel navigálják majd magukat, mint az asztalról lemászó rezgő mobiltelefon.
A rezgéshez egészen minimális energiára van szükség, amiből amúgy is szűkében lesznek, ezért valószínűleg a számítási képességeiket is le kell majd csökkenteni. A robotoknak tudni kell kommunikálniuk egymással, észlelni a környezetüket infravörös érzékelő vagy csápszerű antennák segítségével, sőt az sem kizárt hogy felvételeket fognak készíteni egy 10x10 pixel felbontású kamerával. Mindehhez összesen 10 kilobyte-nyi memóriával rendelkeznek.
Az I-Swarm konzorcium reményei szerint már jövőre be tudja mutatni az első milliméteres robotokat és 2008-ra több száz egység fog együtt dolgozni egy rovarkolónia szintjén.
Videó a robotokról