SG.hu·
Fut, mint a Rabbit
Egy új, két lábon, emberi testtartással járó robot bemutatta futási képességét is. A francia Rabbit teljesen egyedi irányítórendszeren alapul.
Bár futásra más robotok is képesek - mint például a Sony Qrio -, a francia Rabbit azonban teljesen más irányító rendszeren alapul, ami több hónapnyi kiséleti időt spórolhat meg a kutatóknak. Ráadásul összességében gyorsabb mozgást is eredményez számukra, mint a legtöbb humanoid robotnál alkalmazott, úgynevezett próbálkozásos módszerek.
A kutatók hónapokon, akár éveken át programozzák fáradhatatlanul, centiről centire robotjaik mozgását, miközben figyelik, mi történik minden apró mozzanat, mint a láb felemelése, előrelendítése vagy a törzs súlypontjának eltolása hatására. Amikor egy mozdulat sikerrel zárul, az lementődik a robot programjába. Azonban vannak olyan momentumok, melyeknél nagy a kudarc esélye, például a gép túl nagyot lép és felborul. Ekkor a tudósoknak vissza kell térniük a rajzasztalhoz finomítani szerkezetük járásmódján.
"A végén olyanná válik a járásuk, mint egy öregemberé, aki fél lábbal már a sírban van" - mondta Mark Song az Illinois Egyetem mérnöke, aki maga is a robot technikákat kutatja. A megfelelő járás elsajátíttatása egy robottal több havi laboratóriumi munkát vehet igénybe. A Müncheni Műszaki Egyetem kutatói körülbelül 18 hónapot töltöttek el azzal, hogy robotjuk, Johnnie az első lépésektől eljusson a járásig.
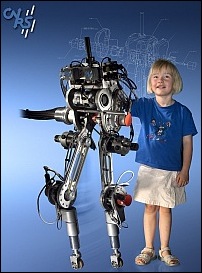
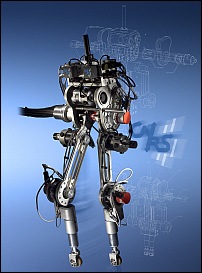
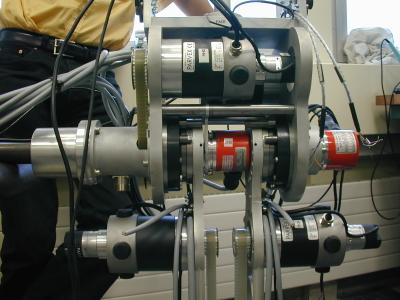
A Rabbit robot - klikk a képekre a nagyobb változathoz
Azonban a másfél méter körüli magassággal rendelkező Rabbit - akit a Francia Nemzeti Robot és Mesterséges Lény (ROBEA) projekt keretein belül terveztek meg és fejlesztettek ki - nem a népszerű próbálkozásos metóduson alapul. Ehelyett egy matematikán alapuló irányító rendszert alkalmaz, amit Jessy Grizzle és Eric Westervelt, a Michigan Egyetem kutatói fejlesztettek ki. A csapat kidolgozott egy módot a robot mozgásának leírására és kiszámítására, olyan matematikai egyenletekkel, melyek bizonyos szinten hasonlóak azokhoz, amik egy régi típusú óra ingáját jellemzik.
Az idő megtartása érdekében az ingának ki kell egyensúlyoznia a lengésből nyert, majd a pálya végén elvesztett energiákat. Hasonló dolog történik, amikor a Rabbit cölöpszerű lábai előre lendülnek, majd lecsapódnak a földre. Ha valaki meglöki az ingát, az nem gyorsul fel, hanem hozzáigazítja nyomatékát, hogy elnyelje az energiát, így nagyon hamar visszaáll megszokott mozgásához. A Rabbit ugyanezt teszi, ha hátulról meglökik.
A pontosan leírt matematikai egyenleteknek köszönhetően a robot már az első alkalommal képes volt a járásra, amikor Grizzle mozgásba hozta. "Két héten belül teljesen rutinszerűen hajtott végre egy kiegyensúlyozott, stabil, a szemnek is tetszetős járást" - mondta Grizzle.
Tizennyolc hónap múltán a Rabbit hat lépést már futásban is meg tudott tenni, azonban még messze van a tökéletestől. Jelenleg csak két dimenzióban képes közlekedni, előre és hátra, valamint fel és le. Egy stabilizáló rúd óvja meg az oldalra dőléstől és futása továbbra is kimerül hat lépésben, azonban Christine Chevallereau, Carlos Canudas de Wit és Gabriel Buche, a ROBEA részéről keményen dolgoznak a hiányosságok orvoslásán, miközben Grizzle is egy hasonló robot elkészítésén fáradozik. "Biztos vagyok benne, hogy a többi kutató hamarosan átveszi kutatásaink egyes elemeit, míg másokat módosítva még érdekesebb áttörésekkel rukkolnak elő" - mondta Grizzle.
Letölthető videók:
A robot futás közben (Mérete 1,2 MB, formátuma WMV)
A robot futás közben, lassítva (Mérete 1,2 MB, formátuma WMV)
A robot járás közben, közelről (Mérete 9 MB, formátuma WMV)
A robot járás közben megfogva, és hátrafelé mozgásra kényszerítve (Mérete 3,7 MB, formátuma WMV)
Bár futásra más robotok is képesek - mint például a Sony Qrio -, a francia Rabbit azonban teljesen más irányító rendszeren alapul, ami több hónapnyi kiséleti időt spórolhat meg a kutatóknak. Ráadásul összességében gyorsabb mozgást is eredményez számukra, mint a legtöbb humanoid robotnál alkalmazott, úgynevezett próbálkozásos módszerek.
A kutatók hónapokon, akár éveken át programozzák fáradhatatlanul, centiről centire robotjaik mozgását, miközben figyelik, mi történik minden apró mozzanat, mint a láb felemelése, előrelendítése vagy a törzs súlypontjának eltolása hatására. Amikor egy mozdulat sikerrel zárul, az lementődik a robot programjába. Azonban vannak olyan momentumok, melyeknél nagy a kudarc esélye, például a gép túl nagyot lép és felborul. Ekkor a tudósoknak vissza kell térniük a rajzasztalhoz finomítani szerkezetük járásmódján.
"A végén olyanná válik a járásuk, mint egy öregemberé, aki fél lábbal már a sírban van" - mondta Mark Song az Illinois Egyetem mérnöke, aki maga is a robot technikákat kutatja. A megfelelő járás elsajátíttatása egy robottal több havi laboratóriumi munkát vehet igénybe. A Müncheni Műszaki Egyetem kutatói körülbelül 18 hónapot töltöttek el azzal, hogy robotjuk, Johnnie az első lépésektől eljusson a járásig.

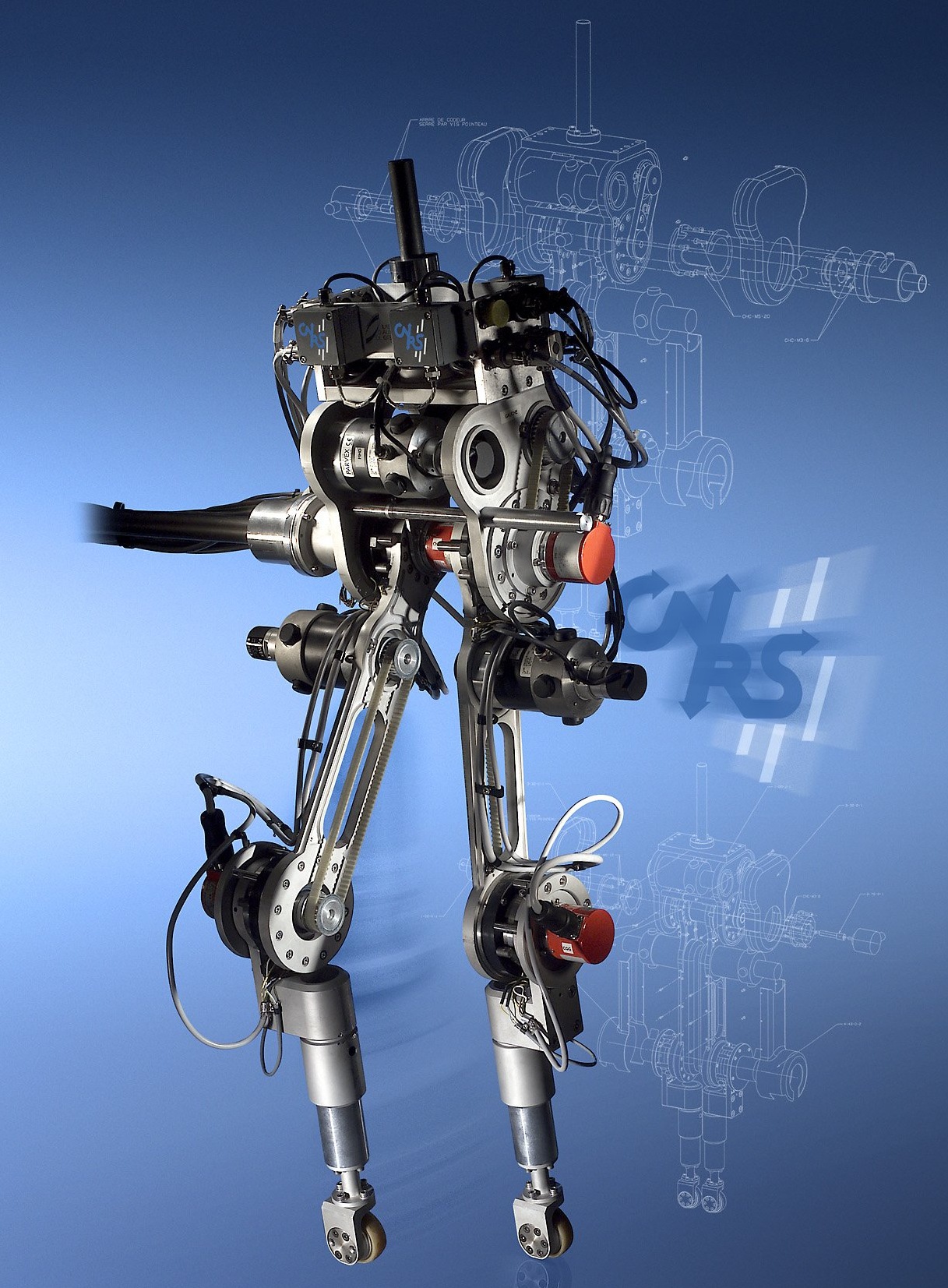
A Rabbit robot - klikk a képekre a nagyobb változathoz
Azonban a másfél méter körüli magassággal rendelkező Rabbit - akit a Francia Nemzeti Robot és Mesterséges Lény (ROBEA) projekt keretein belül terveztek meg és fejlesztettek ki - nem a népszerű próbálkozásos metóduson alapul. Ehelyett egy matematikán alapuló irányító rendszert alkalmaz, amit Jessy Grizzle és Eric Westervelt, a Michigan Egyetem kutatói fejlesztettek ki. A csapat kidolgozott egy módot a robot mozgásának leírására és kiszámítására, olyan matematikai egyenletekkel, melyek bizonyos szinten hasonlóak azokhoz, amik egy régi típusú óra ingáját jellemzik.
Az idő megtartása érdekében az ingának ki kell egyensúlyoznia a lengésből nyert, majd a pálya végén elvesztett energiákat. Hasonló dolog történik, amikor a Rabbit cölöpszerű lábai előre lendülnek, majd lecsapódnak a földre. Ha valaki meglöki az ingát, az nem gyorsul fel, hanem hozzáigazítja nyomatékát, hogy elnyelje az energiát, így nagyon hamar visszaáll megszokott mozgásához. A Rabbit ugyanezt teszi, ha hátulról meglökik.
A pontosan leírt matematikai egyenleteknek köszönhetően a robot már az első alkalommal képes volt a járásra, amikor Grizzle mozgásba hozta. "Két héten belül teljesen rutinszerűen hajtott végre egy kiegyensúlyozott, stabil, a szemnek is tetszetős járást" - mondta Grizzle.
Tizennyolc hónap múltán a Rabbit hat lépést már futásban is meg tudott tenni, azonban még messze van a tökéletestől. Jelenleg csak két dimenzióban képes közlekedni, előre és hátra, valamint fel és le. Egy stabilizáló rúd óvja meg az oldalra dőléstől és futása továbbra is kimerül hat lépésben, azonban Christine Chevallereau, Carlos Canudas de Wit és Gabriel Buche, a ROBEA részéről keményen dolgoznak a hiányosságok orvoslásán, miközben Grizzle is egy hasonló robot elkészítésén fáradozik. "Biztos vagyok benne, hogy a többi kutató hamarosan átveszi kutatásaink egyes elemeit, míg másokat módosítva még érdekesebb áttörésekkel rukkolnak elő" - mondta Grizzle.
Letölthető videók: