SG.hu·
Mesterséges csápokkal dolgozhat a robotcsótány
Képes egy robot úgy navigálni, mint egy rovar? A kérdés megválaszolása érdekében az amerikai Johns Hopkins Egyetem egyik mérnök hallgatója megépített egy érzékelőkkel megtömött hajlékony antennát.
Akárcsak egy csótány izgő-mozgó nyúlványa, a mesterséges csáp is jeleket küld vissza robotgazdája elektronikus agyába, lehetővé téve a gépnek a falak mentén való haladást, anélkül hogy nekimenne a kiszögelléseknek és az útjába kerülő akadályoknak. Noah J. Cowan professzor elméleti, és Owen Y. Loh hallgató gyakorlati munkája azért is fontos, mert a legtöbb veszélyes területek felderítésére tervezett robotjármű mesterséges látásra vagy hangradar-rendszerekre támaszkodik a biztonságos út megtalálásához. A robotszemek azonban mérsékelt fényviszonyok között nem működnek túl hatékonyan, míg a szonár-rendszereket megtéveszthetik a csiszolt felületek.

Egy ilyen érzékelővel a robotok sötét, szűk helyeken is biztonságosan mozoghatnának
Alternatívaként Cowan a tapintáshoz fordult, a rovarvilágból merítve inspirációt, melynek tagjai kifejezetten ügyesen közlekednek sötét helyeket és váltakozó felületeken. A kulcs a csótány csápja volt, mondta Cowan, ami megérintve a környező kiemelkedéseket, jelzést küld a rovarnak az előtt álló akadályról.
Cowan első kiforratlannak nevezhető mesterséges csápját a Stanford Egyetem kutatóival összefogva építette meg, majd később megbízta a Johns Hopkins hallgatóját, Loht egy összetettebb antenna elkészítésével. 2003 őszén Loh elkezdte a csótányok biológiájának tanulmányozását, és a rovar modellje alapján egy robotcsáp megtervezését. "Tetszett a biológia és a robottechnika ötvözésének ötlete" - nyilatkozta. 2004 nyarán készült el Loh első, egyszerű, azonban annál hatékonyabb prototípusa, kevesebb, mint egy hét alatt.
"Owen olyan képességek sorát hozta el a laboratóriumunkba, amivel egyikünk sem rendelkezik" - dicsérte munkatársát Cowan professzor. "Én sokkal inkább egy elméleti kutató vagyok, míg Owen rendkívül ügyes a szereléseknél."
Az elmúlt hónapokban megszületett az antenna egy jóval fejlettebb változata. Loh ezen modellje uretánból, egy hajlékony gumiszerű anyagból készült, amit egy átlátszó műanyag hüvelybe helyeztek. Az uretánba hat olyan szenzort ágyaztak, melyek ellenállása megváltozik hajlítás hatására. "Úgy kalibráltuk az antennát, hogy adott feszültségek adott hajlítási szögekhez kötődjenek, melyek akkor alakulnak ki, amikor az antenna a falhoz vagy valamilyen más objektumhoz ér" - mondta Loh.
Az adatok a robot vezérlőegységét táplálják, lehetővé téve a falhoz viszonyított helyzetének érzékelését és a tárgyak közötti manőverezést. Amikor az antenna azt jelzi, hogy a robot túl közel van a falhoz, a vezérlő elirányítja onnan. Cowan meggyőződése, hogy a csapata által kifejlesztett csótány inspirálta mesterséges csáp egyszer a robotok egy új generációját fogja ellátni a biztonságos közlekedés képességével sötét és veszélyes helyeken, mint például egy füsttel és törmelékekkel teli teremben.
Bemutató videó, hossza 4:41, felbontása 320x240 képpont, mérete 12 Mbyte, formátuma .wmv
Akárcsak egy csótány izgő-mozgó nyúlványa, a mesterséges csáp is jeleket küld vissza robotgazdája elektronikus agyába, lehetővé téve a gépnek a falak mentén való haladást, anélkül hogy nekimenne a kiszögelléseknek és az útjába kerülő akadályoknak. Noah J. Cowan professzor elméleti, és Owen Y. Loh hallgató gyakorlati munkája azért is fontos, mert a legtöbb veszélyes területek felderítésére tervezett robotjármű mesterséges látásra vagy hangradar-rendszerekre támaszkodik a biztonságos út megtalálásához. A robotszemek azonban mérsékelt fényviszonyok között nem működnek túl hatékonyan, míg a szonár-rendszereket megtéveszthetik a csiszolt felületek.
Egy ilyen érzékelővel a robotok sötét, szűk helyeken is biztonságosan mozoghatnának
Alternatívaként Cowan a tapintáshoz fordult, a rovarvilágból merítve inspirációt, melynek tagjai kifejezetten ügyesen közlekednek sötét helyeket és váltakozó felületeken. A kulcs a csótány csápja volt, mondta Cowan, ami megérintve a környező kiemelkedéseket, jelzést küld a rovarnak az előtt álló akadályról.
 Owen Loh kezében a robotcsáppal |
"Owen olyan képességek sorát hozta el a laboratóriumunkba, amivel egyikünk sem rendelkezik" - dicsérte munkatársát Cowan professzor. "Én sokkal inkább egy elméleti kutató vagyok, míg Owen rendkívül ügyes a szereléseknél."
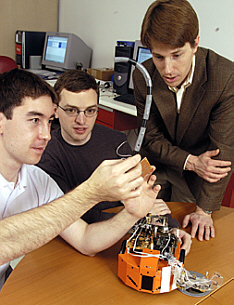 Owen Loh, Brett Kutscher és Noah Cowan |
Az adatok a robot vezérlőegységét táplálják, lehetővé téve a falhoz viszonyított helyzetének érzékelését és a tárgyak közötti manőverezést. Amikor az antenna azt jelzi, hogy a robot túl közel van a falhoz, a vezérlő elirányítja onnan. Cowan meggyőződése, hogy a csapata által kifejlesztett csótány inspirálta mesterséges csáp egyszer a robotok egy új generációját fogja ellátni a biztonságos közlekedés képességével sötét és veszélyes helyeken, mint például egy füsttel és törmelékekkel teli teremben.
Bemutató videó, hossza 4:41, felbontása 320x240 képpont, mérete 12 Mbyte, formátuma .wmv