SG.hu·
Vízen járó robotot épített az MIT
Akár mechanikai csodának is nevezhetjük azt a robotot, ami képes a vízen járni. Az MIT természet inspirálta parányi robotja a vízi rovarokhoz hasonlóan közlekedik a víz színén.
Bár még csak egy alap prototípus készült el, a kutatócsoportot vezető Metin Sitti, a Carnegie Mellon műszaki karának professzora szerint a kész robot bármilyen állóvízen képes lesz majd siklani. Egy kémiai szenzorral felszerelve alkalmazható lenne a vízkészletek szennyeződéseinek felmérésére, míg egy kamera beiktatásával ideális kémmé vagy felderítővé válhatna.
Sitti, a Carnegie Mellon Nanorobot Laboratóriumának vezetője, jó ideje tanulmányozza a vízi rovarokat és foglalkozik robot változatuk megépítésének gondolatával. "Úgy vélem ez az igazi kihívás a mikro-robottechnika számára, annyira könnyűnek és összetettnek kell lennie" - mondta Sitti. "Egyszer nézzék meg, hogyan tartja magát fenn a víz színén a rovar teljes testével."

Metin Sitti, a pittsburghi Carnegie Mellon Egyetem professzora a robot felett
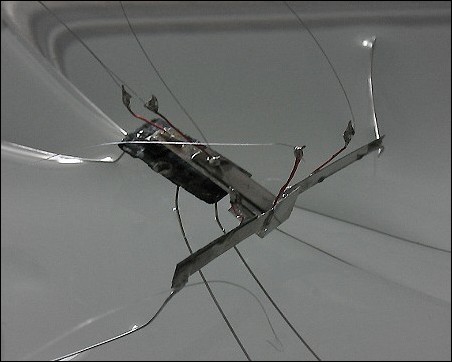
Méretükhöz képest ezek a rovarok igen gyorsan haladnak a vízen. A tavi molnárpoloska másodpercenként egy métert siklik, ami az emberi mértékekhez viszonyítva 640 km/h sebességgel egyenértékű. Jelenleg Sitti robotja csak kevéssel haladja meg az 1 centis méretet, négyzetes teste szénszálas anyagból készült, amit nyolc vízlepergető műanyaggal bevont 5 centiméter hosszú, acéldrótból készült láb szegélyez, tehát gyakorlatilag egy vízipókot alkottak.
Nincs agya, sem szenzora, "izmait" három síkfelületű piezoelektromos aktuátor alkotja, azaz olyan különleges fémdarabok, melyek megváltoztatják alakjukat, amikor elektromosság megy át rajtuk. Az aktuátorokat három áramkör vezérli, melyek egy energiaforráshoz kapcsolódnak. Képes megállni a vízen - nem lebegésről van szó - és előre-hátra siklani két lábával hajtva magát, melyek úgy viselkednek, mint az evezők. Bár még elég egyszerű a szerkezet, Sitti elmondása szerint hat hónapon belül minden különösebb gond nélkül képes lenne egy jóval bonyolultabb robot megépítésére.

A vízen járó robot prototípusa - klikk a képre a nagyobb változathoz
Sitti prototípusa különösen annak fényében jelentős, hogy a kutatók egészen a múlt évig nem igazán ismerték a rovarok vízen járásának elvét. A szóban forgó rovarok azért képesek állni a vízen, mert súlyuk túl kicsi ahhoz, hogy megtörje a víz felületi feszültségét. Hosszú ideig úgy vélték, hogy a rovarok lábaikkal hullámokat keltenek, ezáltal haladva előre, mint amikor a hullám neki csapódik egy csónaknak.
1993-ban Mark Deny, a Stanford Egyetem tenger biológusa előhozakodott egy problémával. Amennyiben a molnárpoloska hullámok létrehozásával mozog, akkor az újonnan kikelt egyedei mozdulatlanná válnának, mivel lábaik még túl fejletlenek, erőtlenek a hullámok előállításához. Valójában azonban az újszülött rovarok pontosan úgy mozognak, mint a felnőtt egyedek. Tavaly az MIT matematikusa, John M.W. Bush és két végzős hallgatója megoldották a rejtvényt, festéket és részecskéket helyezve a rovar mozgásterének szánt vízbe, majd a történéseket egy nagy sebességű videokamerával rögzítették.
Egy kémiai szenzorral a vízkészletek szennyezettségének vizsgálatára használható - klikk a képre a nagyobb változathoz
Bush és társai felfedezték, hogy a molnárpoloskák egy kis mélyedést keltenek a víz színén, azonban nem törik meg a felületi feszültséget. A víz ezután, mint egy trambulin visszapattan, előre lökve a rovart.
A vízen járás fizikája és matematikája mellett Sitti prototípusa azt is jól példázza, milyen messzire vitték a robot technikát a könnyebb és erősebb anyagok. "Ha 10 évvel ezelőtt felkértek volna minket egy vízibogár megépítésére, akkor kétlem, hogy sikerrel jártunk volna" - mondta Mark Cutkosky, a Stanford professzora, aki csótányszerű robotokat épít. Sitti robotjának súlya egy gramm körül mozog, és rendkívűl olcsó az előállítása. A professzor becslése szerint spártai felszereltségű prototípusának anyagköltségei nem haladják meg a 10 dollárt.
Bár még csak egy alap prototípus készült el, a kutatócsoportot vezető Metin Sitti, a Carnegie Mellon műszaki karának professzora szerint a kész robot bármilyen állóvízen képes lesz majd siklani. Egy kémiai szenzorral felszerelve alkalmazható lenne a vízkészletek szennyeződéseinek felmérésére, míg egy kamera beiktatásával ideális kémmé vagy felderítővé válhatna.
Sitti, a Carnegie Mellon Nanorobot Laboratóriumának vezetője, jó ideje tanulmányozza a vízi rovarokat és foglalkozik robot változatuk megépítésének gondolatával. "Úgy vélem ez az igazi kihívás a mikro-robottechnika számára, annyira könnyűnek és összetettnek kell lennie" - mondta Sitti. "Egyszer nézzék meg, hogyan tartja magát fenn a víz színén a rovar teljes testével."
Metin Sitti, a pittsburghi Carnegie Mellon Egyetem professzora a robot felett
Méretükhöz képest ezek a rovarok igen gyorsan haladnak a vízen. A tavi molnárpoloska másodpercenként egy métert siklik, ami az emberi mértékekhez viszonyítva 640 km/h sebességgel egyenértékű. Jelenleg Sitti robotja csak kevéssel haladja meg az 1 centis méretet, négyzetes teste szénszálas anyagból készült, amit nyolc vízlepergető műanyaggal bevont 5 centiméter hosszú, acéldrótból készült láb szegélyez, tehát gyakorlatilag egy vízipókot alkottak.
Nincs agya, sem szenzora, "izmait" három síkfelületű piezoelektromos aktuátor alkotja, azaz olyan különleges fémdarabok, melyek megváltoztatják alakjukat, amikor elektromosság megy át rajtuk. Az aktuátorokat három áramkör vezérli, melyek egy energiaforráshoz kapcsolódnak. Képes megállni a vízen - nem lebegésről van szó - és előre-hátra siklani két lábával hajtva magát, melyek úgy viselkednek, mint az evezők. Bár még elég egyszerű a szerkezet, Sitti elmondása szerint hat hónapon belül minden különösebb gond nélkül képes lenne egy jóval bonyolultabb robot megépítésére.

A vízen járó robot prototípusa - klikk a képre a nagyobb változathoz
Sitti prototípusa különösen annak fényében jelentős, hogy a kutatók egészen a múlt évig nem igazán ismerték a rovarok vízen járásának elvét. A szóban forgó rovarok azért képesek állni a vízen, mert súlyuk túl kicsi ahhoz, hogy megtörje a víz felületi feszültségét. Hosszú ideig úgy vélték, hogy a rovarok lábaikkal hullámokat keltenek, ezáltal haladva előre, mint amikor a hullám neki csapódik egy csónaknak.
1993-ban Mark Deny, a Stanford Egyetem tenger biológusa előhozakodott egy problémával. Amennyiben a molnárpoloska hullámok létrehozásával mozog, akkor az újonnan kikelt egyedei mozdulatlanná válnának, mivel lábaik még túl fejletlenek, erőtlenek a hullámok előállításához. Valójában azonban az újszülött rovarok pontosan úgy mozognak, mint a felnőtt egyedek. Tavaly az MIT matematikusa, John M.W. Bush és két végzős hallgatója megoldották a rejtvényt, festéket és részecskéket helyezve a rovar mozgásterének szánt vízbe, majd a történéseket egy nagy sebességű videokamerával rögzítették.

Egy kémiai szenzorral a vízkészletek szennyezettségének vizsgálatára használható - klikk a képre a nagyobb változathoz
Bush és társai felfedezték, hogy a molnárpoloskák egy kis mélyedést keltenek a víz színén, azonban nem törik meg a felületi feszültséget. A víz ezután, mint egy trambulin visszapattan, előre lökve a rovart.
A vízen járás fizikája és matematikája mellett Sitti prototípusa azt is jól példázza, milyen messzire vitték a robot technikát a könnyebb és erősebb anyagok. "Ha 10 évvel ezelőtt felkértek volna minket egy vízibogár megépítésére, akkor kétlem, hogy sikerrel jártunk volna" - mondta Mark Cutkosky, a Stanford professzora, aki csótányszerű robotokat épít. Sitti robotjának súlya egy gramm körül mozog, és rendkívűl olcsó az előállítása. A professzor becslése szerint spártai felszereltségű prototípusának anyagköltségei nem haladják meg a 10 dollárt.


