SG.hu·
Léghoki és űrállomás
Léghoki asztalokon szimulálják az űr súrlódásmentes körülményeit azon intelligens robotok új generációja számára, melyeket arra képeznek ki, hogy űrállomásokat és napenergia paneleket építsenek a világűrben.
A jövő építőmunkásai egy túlméretezett hokikorongra hasonlítanak, melyek légpárnán lebegnek miközben összegyűjtik az építőelemeket, és vázszerkezeteket alkotnak belőlük. Ezek a prototípusok teljes űrrendszerek megépítésére alkalmas robotokhoz vezethetnek, a NASA számításai szerint akár 10 kilométer hosszúságú vázszerkezetek összerakására is képesek lesznek.
 Wei-Min Shen és a Dél-Kalifornia Egyetem munkatársai a Bostonban megtartott Összetett Rendszerek Nemzetközi Konferenciáján mutatták be a robotokat. Az emberi űrutazás ismert kockázatait figyelembe véve úgy vélik, a robotok jelentik a legjobb megoldást a világűrben történő összeszerelésekhez. "Az űrhajósok által kivitelezett összeszerelés túl költséges és kockázatos lenne" - mondta Shen. Csapata a NASA-val együttműködve fejleszt intelligens robotrendszereket, melyek képesek saját tevékenységüket koordinálni, így nincs szükségük folyamatos emberi ellenőrzésre és pontos irányításra.
Wei-Min Shen és a Dél-Kalifornia Egyetem munkatársai a Bostonban megtartott Összetett Rendszerek Nemzetközi Konferenciáján mutatták be a robotokat. Az emberi űrutazás ismert kockázatait figyelembe véve úgy vélik, a robotok jelentik a legjobb megoldást a világűrben történő összeszerelésekhez. "Az űrhajósok által kivitelezett összeszerelés túl költséges és kockázatos lenne" - mondta Shen. Csapata a NASA-val együttműködve fejleszt intelligens robotrendszereket, melyek képesek saját tevékenységüket koordinálni, így nincs szükségük folyamatos emberi ellenőrzésre és pontos irányításra.
Számos kutatócsoport demonstrálta már, hogy a mobil és egymással kommunikálni képes robotok csapatai alkalmasak összetett feladatok elvégzésére, ami hasonlít a hangyák által tanúsított csoport intelligenciájához a csoportos tevékenységek, mint például az élelemszerzés véghez viteléhez. Az űrben a nehézségekhez társul a súlytalanság, a súrlódásmentes környezet is, ami nehezebbé teszi a mozgások irányítását. Két különböző összeállítandó alkatrészt hordozó robot könnyedén összeütközhet, vagy elvéthetik egymást.
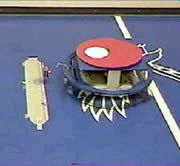
A hasonló nehézségek felderítéséhez Shen és kollégái megalkották az űr egy kétdimenziós megfelelőjét, közismertebb néven egy léghoki asztalt, ahol parányi lyukak sokaságán légsugarak áramlanak ki az asztal felszínére, így a korong alakú robotok lényegében súrlódásmentes környezetben lebeghetnek. A robotok, melyek jelenleg mindössze 30 centiméter szélesek, négy fedélzeti propeller segítségével mozognak. Mozgásukat egy vezeték nélküli adóval irányítják, látásukat videokamerák adják.
Végeredményben a tudósok remélik, hogy minden egyes robotban lecserélhetik a központosított irányító rendszert önrendelkezésű érzékelő és irányító szerkezetekre. A robotok sajátossága hogy párban dolgoznak, amit egy kábel tesz kézzelfoghatóvá. Ez segít a különálló korongokat megakadályozni, hogy kirepüljenek az irányítás alól, és egymáshoz húzza őket, amikor az általuk szállított alkatrészeket össze kell rakni. Amikor a kábel ki van eresztve, mindkét korong egymástól függetlenül mozoghat szerkezeti elemek után kutatva.
Eddig az ilyen jellegű kísérletekben hosszú, merev szerkezeti elemeket alkalmaztak, melyeknek mindkét végén egy-egy csatlakozó található így hajlékony láncokba formálódhattak. Amint egy páros mindkét robotja talált magának egy szerkezeti elemet mechanikus dokkoló egységeikkel megragadták azt, majd a kábelt feltekercselve a két korong rakományát egymáshoz húzza. Shen robotjai tökéletesítették ezt az eljárást, számukra már nem okoz gondot két elem megtalálása és egymáshoz rögzítése. A következő lépés egy harmadik elem hozzáadásával egy háromszög elkészítése.
"Most ezen az utolsó lépésen dolgozunk" - mondta Shen, aki úgy véli, hamarosan képesek lesznek előállítani ezeket az alakzatokat. A háromszögű elemek szilárd szerkezetként viselkednek, melyeket nagyobb vázszerkezetekké rakhatnak össze.
Letölthető videók:
Dokkolás #1
Dokkolás #2
Manuális dokkolás #1
Manuális dokkolás #2
Szabad mozgás
Célhoz menés és megállás
A jövő építőmunkásai egy túlméretezett hokikorongra hasonlítanak, melyek légpárnán lebegnek miközben összegyűjtik az építőelemeket, és vázszerkezeteket alkotnak belőlük. Ezek a prototípusok teljes űrrendszerek megépítésére alkalmas robotokhoz vezethetnek, a NASA számításai szerint akár 10 kilométer hosszúságú vázszerkezetek összerakására is képesek lesznek.
Wei-Min Shen és a Dél-Kalifornia Egyetem munkatársai a Bostonban megtartott Összetett Rendszerek Nemzetközi Konferenciáján mutatták be a robotokat. Az emberi űrutazás ismert kockázatait figyelembe véve úgy vélik, a robotok jelentik a legjobb megoldást a világűrben történő összeszerelésekhez. "Az űrhajósok által kivitelezett összeszerelés túl költséges és kockázatos lenne" - mondta Shen. Csapata a NASA-val együttműködve fejleszt intelligens robotrendszereket, melyek képesek saját tevékenységüket koordinálni, így nincs szükségük folyamatos emberi ellenőrzésre és pontos irányításra. Számos kutatócsoport demonstrálta már, hogy a mobil és egymással kommunikálni képes robotok csapatai alkalmasak összetett feladatok elvégzésére, ami hasonlít a hangyák által tanúsított csoport intelligenciájához a csoportos tevékenységek, mint például az élelemszerzés véghez viteléhez. Az űrben a nehézségekhez társul a súlytalanság, a súrlódásmentes környezet is, ami nehezebbé teszi a mozgások irányítását. Két különböző összeállítandó alkatrészt hordozó robot könnyedén összeütközhet, vagy elvéthetik egymást.
A hasonló nehézségek felderítéséhez Shen és kollégái megalkották az űr egy kétdimenziós megfelelőjét, közismertebb néven egy léghoki asztalt, ahol parányi lyukak sokaságán légsugarak áramlanak ki az asztal felszínére, így a korong alakú robotok lényegében súrlódásmentes környezetben lebeghetnek. A robotok, melyek jelenleg mindössze 30 centiméter szélesek, négy fedélzeti propeller segítségével mozognak. Mozgásukat egy vezeték nélküli adóval irányítják, látásukat videokamerák adják.
Végeredményben a tudósok remélik, hogy minden egyes robotban lecserélhetik a központosított irányító rendszert önrendelkezésű érzékelő és irányító szerkezetekre. A robotok sajátossága hogy párban dolgoznak, amit egy kábel tesz kézzelfoghatóvá. Ez segít a különálló korongokat megakadályozni, hogy kirepüljenek az irányítás alól, és egymáshoz húzza őket, amikor az általuk szállított alkatrészeket össze kell rakni. Amikor a kábel ki van eresztve, mindkét korong egymástól függetlenül mozoghat szerkezeti elemek után kutatva.
Eddig az ilyen jellegű kísérletekben hosszú, merev szerkezeti elemeket alkalmaztak, melyeknek mindkét végén egy-egy csatlakozó található így hajlékony láncokba formálódhattak. Amint egy páros mindkét robotja talált magának egy szerkezeti elemet mechanikus dokkoló egységeikkel megragadták azt, majd a kábelt feltekercselve a két korong rakományát egymáshoz húzza. Shen robotjai tökéletesítették ezt az eljárást, számukra már nem okoz gondot két elem megtalálása és egymáshoz rögzítése. A következő lépés egy harmadik elem hozzáadásával egy háromszög elkészítése.
"Most ezen az utolsó lépésen dolgozunk" - mondta Shen, aki úgy véli, hamarosan képesek lesznek előállítani ezeket az alakzatokat. A háromszögű elemek szilárd szerkezetként viselkednek, melyeket nagyobb vázszerkezetekké rakhatnak össze.
Letölthető videók: