SG.hu·
Új mozgástípust fejlesztettek ki a robotoknak
Miniatűr robotok borítják fel önmagukat egy japán laboratóriumban, ez azonban nem egyfajta hibajelenség, mint azt a külső szemlélő első pillantásra gondolná. Ezeknek a gépeknek a mozgását pontosan így tervezték.
A kerék alakú robotokat - melyek mindössze 4 centiméter átmérőjűek és 1 centi vastagok - Shinichi Hirai és Yuuta Sugiyama, a Ritsumeikan Egyetem mérnökei építették. A robotok alakjuk folyamatos változtatásával hajtják előre önmagukat. A kerék pereme elasztikus polimerből készült, míg a küllőket egy alakemlékező ötvözetként ismert okos anyagból készítették, ami a hevítés hatására összehúzódik. A küllők megrövidülése a kerék elején alakváltozást eredményez, ami arra készteti a perem földhöz kapcsolódó pontját, hogy hátrafelé mozogjon, a gravitáció középpontja mögé. Amikor a kerék ezt követően előre billen, más küllők melegednek, hogy újra elváltoztassák a peremet és ezáltal biztosítsák a robot gördülését.
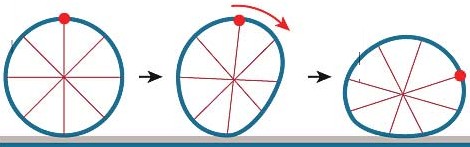
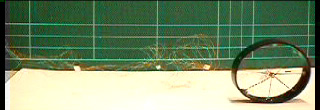
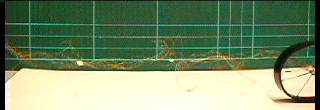
A kerék alakú robot mozgás előtt deformálja alakját, "átesik", majd az emlékező anyag ismét az eredeti formára ugrik vissza
Az alakemlékező ötvözetek kristályos szerkezeteikre gyakorolt terhelés formájában tárolják az energiát. Ha elektromos feszültséget vezetünk keresztül a küllőkön, az felhevíti azokat, kieresztve ezt az energiát, egyben összehúzva őket. Ha hagyjuk lehűlni, a küllők visszatérnek eredeti állapotukba. A robotot működtető elektromosságot könnyű réz drótokon juttatják el a géphez, amit a végső változatnál újratölthető akkura cserélnek majd.


A gördülő robotok jól szerepelnek sima felszínen, és akár egy 20 fokos emelkedőt is képesek megmászni. Amennyire csak lehetséges lelapítják magukat, majd visszaugranak kör alakjukba, amit a külső perem ruganyossága tesz lehetővé, így a robot 8 centit képes ugrani a levegőbe. A mérnökök szerint ha ezt a technikát három kerékre vetítik le, melyek kölcsönösen függő elrendezésben vannak összeállítva, akkor megépíthető lenne egy labda alakú, kormányozható robot.
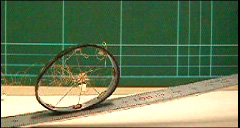

A robotkerék emelkedőn felfelé is képes haladni
Hirai és Sugiyama még nem tudják milyen alkalmazásai lehetnek ötletüknek, azonban Robert Richardson, a brit Manchester Egyetem robot szakértője szerint a katonai felderítésben juthatnának szerephez. "Kis tömegűek és nehéz őket megrongálni, így jól bírnák, ha elszigetelt területekre dobnák le egy repülőgépről" - mondta. A gördülő terepjárókat ezután akár be is lehetne programozni, hogy egy bizonyos irányba haladjanak, átpattogva az akadályokon, miközben kameráikkal szemügyre vennék a terepet. Richardson azonban figyelmeztet, az ilyen gördülő gépezetek pontos irányítása nem könnyű feladat. "Nem valószínű, hogy képesek lennének gyors megállásra, ha a szükség úgy kívánja" - tette hozzá.

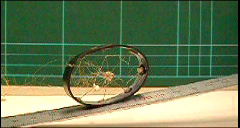
Ugrani is tud
Jelenleg a japán csapat örül, hogy sikerült a torzulást, mint a robotmozgás egyik új formáját bemutatniuk. Fő céljuk annak bebizonyítása volt, hogy a zord terepen való haladáshoz nincs szükség merev, nagy testű, hernyótalpú robotokra, vagy kerekes járművekre.
Letölthető videók:
Emelkedőn haladás
Ugrás
A mozgás szimulációs modellje
A kerék alakú robotokat - melyek mindössze 4 centiméter átmérőjűek és 1 centi vastagok - Shinichi Hirai és Yuuta Sugiyama, a Ritsumeikan Egyetem mérnökei építették. A robotok alakjuk folyamatos változtatásával hajtják előre önmagukat. A kerék pereme elasztikus polimerből készült, míg a küllőket egy alakemlékező ötvözetként ismert okos anyagból készítették, ami a hevítés hatására összehúzódik. A küllők megrövidülése a kerék elején alakváltozást eredményez, ami arra készteti a perem földhöz kapcsolódó pontját, hogy hátrafelé mozogjon, a gravitáció középpontja mögé. Amikor a kerék ezt követően előre billen, más küllők melegednek, hogy újra elváltoztassák a peremet és ezáltal biztosítsák a robot gördülését.
A kerék alakú robot mozgás előtt deformálja alakját, "átesik", majd az emlékező anyag ismét az eredeti formára ugrik vissza
Az alakemlékező ötvözetek kristályos szerkezeteikre gyakorolt terhelés formájában tárolják az energiát. Ha elektromos feszültséget vezetünk keresztül a küllőkön, az felhevíti azokat, kieresztve ezt az energiát, egyben összehúzva őket. Ha hagyjuk lehűlni, a küllők visszatérnek eredeti állapotukba. A robotot működtető elektromosságot könnyű réz drótokon juttatják el a géphez, amit a végső változatnál újratölthető akkura cserélnek majd.
A gördülő robotok jól szerepelnek sima felszínen, és akár egy 20 fokos emelkedőt is képesek megmászni. Amennyire csak lehetséges lelapítják magukat, majd visszaugranak kör alakjukba, amit a külső perem ruganyossága tesz lehetővé, így a robot 8 centit képes ugrani a levegőbe. A mérnökök szerint ha ezt a technikát három kerékre vetítik le, melyek kölcsönösen függő elrendezésben vannak összeállítva, akkor megépíthető lenne egy labda alakú, kormányozható robot.
A robotkerék emelkedőn felfelé is képes haladni
Hirai és Sugiyama még nem tudják milyen alkalmazásai lehetnek ötletüknek, azonban Robert Richardson, a brit Manchester Egyetem robot szakértője szerint a katonai felderítésben juthatnának szerephez. "Kis tömegűek és nehéz őket megrongálni, így jól bírnák, ha elszigetelt területekre dobnák le egy repülőgépről" - mondta. A gördülő terepjárókat ezután akár be is lehetne programozni, hogy egy bizonyos irányba haladjanak, átpattogva az akadályokon, miközben kameráikkal szemügyre vennék a terepet. Richardson azonban figyelmeztet, az ilyen gördülő gépezetek pontos irányítása nem könnyű feladat. "Nem valószínű, hogy képesek lennének gyors megállásra, ha a szükség úgy kívánja" - tette hozzá.
Ugrani is tud
Jelenleg a japán csapat örül, hogy sikerült a torzulást, mint a robotmozgás egyik új formáját bemutatniuk. Fő céljuk annak bebizonyítása volt, hogy a zord terepen való haladáshoz nincs szükség merev, nagy testű, hernyótalpú robotokra, vagy kerekes járművekre.
Letölthető videók:

