SG.hu·
Űrcowboyok, avagy önrendező robotok az űrben
A NASA Ames Kutató Központjában megrendezett Robosphere 2002 konferencián Wei-Min Shen, az ISI (Információ Tudományok Intézete) kutatója egy merész terv részleteit tárta a hallgatóság elé, mely a tervezett 800 méter hosszú Space Solar Power System műhold emberi segítség nélküli összeállítását mutatja be.
 Shen és kutató társa Peter Will nem csupán jóslatokkal állt elő, folyamatban van a hardver és a szoftver tesztelése, melyet a rendszer az ISI Shen igazgatása alatt álló polimorf robottechnikai laborjában fog alkalmazni.
Shen és kutató társa Peter Will nem csupán jóslatokkal állt elő, folyamatban van a hardver és a szoftver tesztelése, melyet a rendszer az ISI Shen igazgatása alatt álló polimorf robottechnikai laborjában fog alkalmazni.
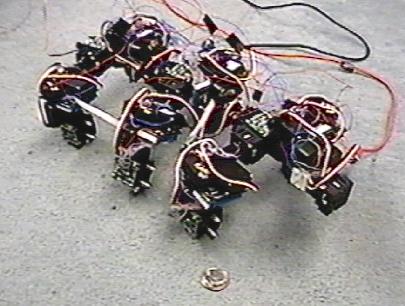
Az elmúlt két és fél év során Shen és Will moduláris egyéni robot egységeket fejlesztettek ki, melyek rendelkeznek egy-egy programozott számítógépes chippel, amit a kutatók "hormonális" szoftvernek neveznek. Shen elmondása szerint ez a szoftver lehetővé teszi a modulok "egyesítését és viselkedésük változtatását".
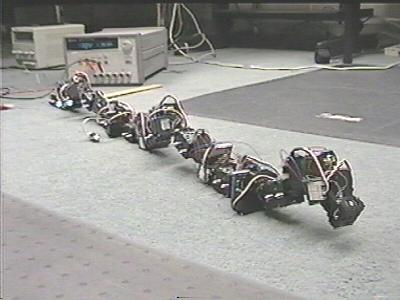
Az egységek nagyobb egészekbe képesek önmagukat egyesíteni vagy kisebb részekre szétválasztani. "Ha egy hategységnyi kígyót félbevágunk, két kisebb, háromegységnyi kígyót kapunk, ami ugyanúgy működik, mint azt a nagy tette" - magyarázta Shen. Az elválasztott egységek infravörös jelekkel kommunikálnak, összekapcsolt egységeiket egybehangolt módon manőverezve.
A "viselkedésváltoztatás" azt jelenti, hogy a különálló egységek, melyek egyformák, az összerakásban elfoglalt pozíciójuknak megfelelően viselkednek. Will és Shen CONRO projektje alkotta meg a szoftvert használó dolgozó egységeket. A SOLAR űrállomás tervezet, melyet a NASA, az NSF és az Elektromos Energia Kutató Intézet (EPRI) konzorciuma finanszíroz, gigantikus méretekben fogja ezt az architektúrát alkalmazni. A tervek szerint az önösszeszerelő űrállomás két robot fajból fog állni, melyeket ugyanaz a szoftver irányít. Az egyik fajból építkezik maga az állomás, napcella egységek, beleértve a szükséges csőrendszereket. Mindegyikük rendelkezni fog egy a hormonális szoftvert futtató mikroprocesszorral. Az összekapcsolható egységek amint kijutnak a világűrbe önmagukat rendezik a kívánt konfigurációba.
Amint egy-egy alfelépítmény készen áll jelt ad a második robot fajnak, a "szabadon repülő intelligens szál összekötő egységeknek", avagy ostoroknak.
Az ostorok két moduláris robot egységből állnak, melyeket egy hosszú csatlakozó kábel köt össze, ami nyújtható vagy rövidíthető. Nap elemes rakétákkal lesznek felszerelve, mely lehetővé teszi számukra a mozgást, valamint GPS szenzorokkal, hogy megtalálják pozícióikat, kommunikátoraikat és csatlakozásaikat. Az összeszerelés végeztével az ostorok az alfelépítményhez manővereznek, rácsatlakoznak, majd várják a jelzését egy másik alfelépítménynek, az elsőt odavontatják és összehúzzák a kettőt a kábel becsőrlőzésével, így a részek csatlakozhatnak egymáshoz. Amint ez megtörtént az ostor egység tovább repül újabb összerakásra váró egységeket keresve.
A laborban Shen és Will kétdimenziós formában modellezték az elvet, egy lég-hoki asztalon dolgozva, amin a prototípus egységek megtanulták megtalálni egymást az infravörös jelekkel, a manőverezést, az összekapcsolódást és a motorizált kábellel történő összehúzást.
"Ez mind a hardver mind a szoftver számára valósághű tesztet eredményez" - mondta Shen. Az első prototípus egységet Harshit Suri kutató építette.
Shen és kutató társa Peter Will nem csupán jóslatokkal állt elő, folyamatban van a hardver és a szoftver tesztelése, melyet a rendszer az ISI Shen igazgatása alatt álló polimorf robottechnikai laborjában fog alkalmazni.Az elmúlt két és fél év során Shen és Will moduláris egyéni robot egységeket fejlesztettek ki, melyek rendelkeznek egy-egy programozott számítógépes chippel, amit a kutatók "hormonális" szoftvernek neveznek. Shen elmondása szerint ez a szoftver lehetővé teszi a modulok "egyesítését és viselkedésük változtatását".
Az egységek nagyobb egészekbe képesek önmagukat egyesíteni vagy kisebb részekre szétválasztani. "Ha egy hategységnyi kígyót félbevágunk, két kisebb, háromegységnyi kígyót kapunk, ami ugyanúgy működik, mint azt a nagy tette" - magyarázta Shen. Az elválasztott egységek infravörös jelekkel kommunikálnak, összekapcsolt egységeiket egybehangolt módon manőverezve.
A "viselkedésváltoztatás" azt jelenti, hogy a különálló egységek, melyek egyformák, az összerakásban elfoglalt pozíciójuknak megfelelően viselkednek. Will és Shen CONRO projektje alkotta meg a szoftvert használó dolgozó egységeket. A SOLAR űrállomás tervezet, melyet a NASA, az NSF és az Elektromos Energia Kutató Intézet (EPRI) konzorciuma finanszíroz, gigantikus méretekben fogja ezt az architektúrát alkalmazni. A tervek szerint az önösszeszerelő űrállomás két robot fajból fog állni, melyeket ugyanaz a szoftver irányít. Az egyik fajból építkezik maga az állomás, napcella egységek, beleértve a szükséges csőrendszereket. Mindegyikük rendelkezni fog egy a hormonális szoftvert futtató mikroprocesszorral. Az összekapcsolható egységek amint kijutnak a világűrbe önmagukat rendezik a kívánt konfigurációba.
Amint egy-egy alfelépítmény készen áll jelt ad a második robot fajnak, a "szabadon repülő intelligens szál összekötő egységeknek", avagy ostoroknak.
Az ostorok két moduláris robot egységből állnak, melyeket egy hosszú csatlakozó kábel köt össze, ami nyújtható vagy rövidíthető. Nap elemes rakétákkal lesznek felszerelve, mely lehetővé teszi számukra a mozgást, valamint GPS szenzorokkal, hogy megtalálják pozícióikat, kommunikátoraikat és csatlakozásaikat. Az összeszerelés végeztével az ostorok az alfelépítményhez manővereznek, rácsatlakoznak, majd várják a jelzését egy másik alfelépítménynek, az elsőt odavontatják és összehúzzák a kettőt a kábel becsőrlőzésével, így a részek csatlakozhatnak egymáshoz. Amint ez megtörtént az ostor egység tovább repül újabb összerakásra váró egységeket keresve.
A laborban Shen és Will kétdimenziós formában modellezték az elvet, egy lég-hoki asztalon dolgozva, amin a prototípus egységek megtanulták megtalálni egymást az infravörös jelekkel, a manőverezést, az összekapcsolódást és a motorizált kábellel történő összehúzást.
"Ez mind a hardver mind a szoftver számára valósághű tesztet eredményez" - mondta Shen. Az első prototípus egységet Harshit Suri kutató építette.