SG.hu·
Kirakta a Rubik-kockát egy robotkar
Nem az egykezes tekerés a lényeg, hanem az ahhoz vezető folyamat, és hogy mennyire robosztus a megoldás.
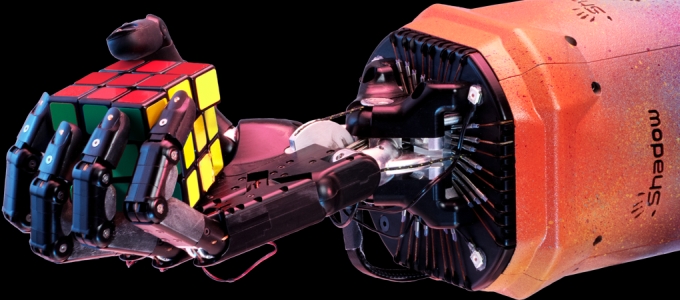
Az OpenAi nevű cég által kifejlesztett robotkar képes volt önállóan kirakni egy Rubik-kockát. Mindez nem valósulhatott volna meg az eszközt vezérlő és a gépi tanulásra épülő program nélkül, amely végigvezette a robotkart a folyamaton és amely az egyes ujjakat, illetve a kezet is képes volt irányítani. A szakemberek létrehoztak egy virtuális környezetet, amelyben a fizika törvényeit szimulálták. Ebben a környezetben alkalmazták a robotkar és annak szenzorainak modelljeit. Miután az ilyen környezetek akár egymással párhuzamosan több ezerszer is lefuttathatók, így a szoftver sokkal gyorsabban tanulta meg, hogy miként rakja ki a Rubik-kockát.
Az edzéskörnyezeteket az Algorithmus Automatic Domain Randomization (ADR) segítségével alakították ki, amely fokozatosan egyre nehezebb és véletlenszerűen felépített szituációkat alakított ki, s a rendszernek ezekkel kellett megbirkóznia. Az egyik véletlenszerűen generált paraméter a Rubik-kocka mérete volt.
A tesztelés végső szakaszát a valódi világban végzett kísérletek jelentették. Itt a robotkart szintén különböző körülmények között működtették. Az egyik esetben összekötöttek két ujjat, a másikban a kézre gumikesztyűt húztak, de volt, hogy a Rubik-kockára gyakoroltak hatásokat. A cél az volt, hogy a robotkart annyira ellenállóvá tegyék a külső behatásokkal szemben, amennyire csak lehetséges. Ez ugyanis kulcsfontosságú lehet a jövőbeli egyéb cselekedetek alkalmával.
A fejlődés ellenére a rendszer csak az időben korlátozott és megnehezített tesztek 20 százalékában tudta sikeresen kirakni a Rubik-kockát. Ilyenkor 26 mozdulatra volt szüksége a sikerhez. Az átlagos esetekben 100 kísérletből 60 volt sikeres.
Az OpenAi nevű cég által kifejlesztett robotkar képes volt önállóan kirakni egy Rubik-kockát. Mindez nem valósulhatott volna meg az eszközt vezérlő és a gépi tanulásra épülő program nélkül, amely végigvezette a robotkart a folyamaton és amely az egyes ujjakat, illetve a kezet is képes volt irányítani. A szakemberek létrehoztak egy virtuális környezetet, amelyben a fizika törvényeit szimulálták. Ebben a környezetben alkalmazták a robotkar és annak szenzorainak modelljeit. Miután az ilyen környezetek akár egymással párhuzamosan több ezerszer is lefuttathatók, így a szoftver sokkal gyorsabban tanulta meg, hogy miként rakja ki a Rubik-kockát.
Az edzéskörnyezeteket az Algorithmus Automatic Domain Randomization (ADR) segítségével alakították ki, amely fokozatosan egyre nehezebb és véletlenszerűen felépített szituációkat alakított ki, s a rendszernek ezekkel kellett megbirkóznia. Az egyik véletlenszerűen generált paraméter a Rubik-kocka mérete volt.
A tesztelés végső szakaszát a valódi világban végzett kísérletek jelentették. Itt a robotkart szintén különböző körülmények között működtették. Az egyik esetben összekötöttek két ujjat, a másikban a kézre gumikesztyűt húztak, de volt, hogy a Rubik-kockára gyakoroltak hatásokat. A cél az volt, hogy a robotkart annyira ellenállóvá tegyék a külső behatásokkal szemben, amennyire csak lehetséges. Ez ugyanis kulcsfontosságú lehet a jövőbeli egyéb cselekedetek alkalmával.
A fejlődés ellenére a rendszer csak az időben korlátozott és megnehezített tesztek 20 százalékában tudta sikeresen kirakni a Rubik-kockát. Ilyenkor 26 mozdulatra volt szüksége a sikerhez. Az átlagos esetekben 100 kísérletből 60 volt sikeres.