SG.hu·
Egy óra alatt megtanulhat futni egy robotkutya

A gerincvelő mesterséges idegrendszereként működő, kezdetben nem ideálisan beállított számítógépes program egy algoritmusnak köszönhetően nagyon rövid idő alatt megtanulja optimalizálni a robot mozgását.
Egy a vadonban születő zsiráfnak vagy zebrának a születése után nagyon gyorsan, percek alatt meg kell tanulnia használnia a lábait. Az állatok teljes felszereltséggel születnek, de az összes izom és ín tökéletes használatára irányuló koordináció csak tanulással jön létre. Amíg nem képesek önállóan menekülni a ragadozók elől, az újszülött állatbébik reflexeikre vannak utalva. A reflexek segítenek nekik elkerülni, hogy elessenek és megsérüljenek az első járási kísérleteik során. A pontos izomkontrollt gyakorolni kell, amíg egy bizonyos ponton a gerincvelő idegrendszere jól alkalmazkodik. Egy idő után megszűnik a kontrollálatlan botladozás - a fiatal állat képes lépést tartani felnőtt társaival.
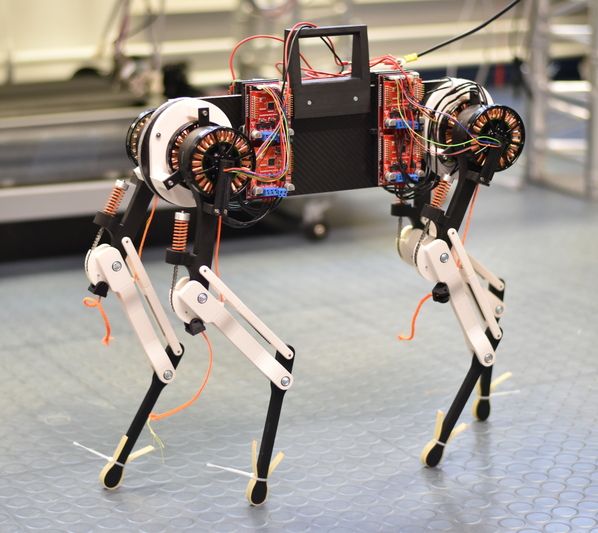
A stuttgarti Max Planck Intelligens Rendszerek Intézete (MPI-IS) kutatói azt vizsgálták, hogyan tanulnak meg az állatok járni és botladozni. Ehhez építettek egy négylábú robotot, amely egy kutyára hasonlít. "Mérnökként és robotikusként egy olyan robot megépítésével kerestük a választ, amely olyan reflexekkel rendelkezik, mint egy állat, és tanul a hibákból. Ha egy állat megbotlik, az hiba? Nem, ha csak egyszer történik meg. De ha gyakran botladozik, az egyfajta mércét ad arról, hogy mennyire jól működik a járás" - nyilatkozta Felix Ruppert, az MPI-IS Dynamic Locomotion nevű kutatócsoportjának korábbi PhD-hallgatója.
Ruppert robotja a beindítás kezdetétől számítva mindössze egy óra alatt megtanulta a lehető legjobban használni a belső mechanikáját. Ez egy Bayes-féle optimalizációs tanulási algoritmussal működik: a lábakról származó szenzoros információkat (a tényleges adatokat) összevetik a számítógép vagy a virtuális gerincvelő céladataival. A robot úgy tanul meg járni, hogy a továbbított mozgásminták szerkezetét folyamatosan hozzáigazítja az érzékelőből érkező információkhoz.
A tanulási algoritmus befolyásolja a központi (mozgás)minta-generátort (CPG). Embereknél és állatoknál ezek a mintagenerátorok a gerincvelőben található idegsejtek hálózatai, amelyek az agy befolyása nélkül, önállóan okoznak ritmikus izomösszehúzódásokat. Ezek a neuronhálózatok fontos szerepet játszanak az olyan folyamatos mozgásokban, mint a járás, a pislogás vagy az emésztés. Az újszülött állatoknál nagyon könnyen látható, hogy a CPG-k még nem elég pontosan beállítottak. Amíg a fiatal állat tökéletesen sík felületen sétál, a CPG-k helyesen irányítják a gerincvelőből érkező mozgásjeleket. Egy kis ütközésnél ez gyorsan megváltozik; a reflexek beindulnak és úgy igazítják a mozgásmintákat, hogy az állat ne essen el.
A mozgásjelek e pillanatnyi változásai reverzibilisek, azaz "rugalmasak" és a mozgásminták a zavarás után visszatérnek eredeti konfigurációjukba. Ha azonban az állat - az aktív reflexek ellenére - több mozgáscikluson keresztül nem hagyja abba a botladozást, akkor a mozgásmintákat újra kell tanulni, mégpedig "plasztikusan", azaz visszafordíthatatlanul. Ugyanez a helyzet a "Morti" nevű labrador méretű robotkutyával. A mozgásmintáit azonban sokkal gyorsabban, körülbelül egy óra alatt optimalizálja.
A Morti CPG-t egy számítógépben szimulálják. Ez a virtuális gerincvelő a négylábúhoz ott csatlakozik, ahol a feje valójában lenne. Az alatt az egy óra alatt, amíg a robot zavartalanul fut, a lábakra erősített érzékelők adatait folyamatosan összehasonlítják a CPG jelekkel. Ha a robot megbotlik, a tanulási algoritmus megváltoztatja, hogy a lábak mennyire lengjenek előre-hátra, milyen gyorsan lengjenek és mennyi ideig maradjon egy láb a földön. A beállított lábmozgás befolyásolja, hogy a robot mennyire jól vagy rosszul tudja kihasználni a mechanikáját. A CPG adaptált jeleket küld, hogy a robot ezentúl a lehető legkevesebbet botladozzon, és így optimalizálja a járását. A virtuális gerincvelőnek nem kell tudnia, hogy a robot mesterséges izmokkal és inakkal rendelkezik. Semmit sem tud a gép fizikájáról.
"A robotunk allegorikusan születik, és semmit sem tud arról, hogyan működnek a lábai. A CPG úgy működik, mint egy beépített automata járási intelligencia, amelyet a természet biztosít számunkra, és amelyet átültettünk a robotba. A számítógép jeleket állít elő, amelyek a lábakhoz mennek. A robot sétál és botladozik. Ezek az adatok az érzékelőkből visszaáramlanak, és a számítógép összeveti őket, amely vakon generálja a mozgásmintákat. Ha az adatok nem felelnek meg az előírásoknak, akkor addig változtatja a járási viselkedést, amíg a botladozás nélküli járás nem működik. A tanulási folyamat az, hogy megváltoztassuk az alapértelmezettet, hogy mit kell tennie a lábaknak" - magyarázta Ruppert.
A csöppnyi számítógép a folyamat közben mindössze öt watt energiát fogyaszt. A neves gyártók hatalmas robotszerkezetei, amelyek összetett és bonyolult vezérlőrendszerek segítségével tanultak meg működni és amelyeknek pontos tömege és geometriája ismert, sokkal nagyobb energiaigényűek - általában több tucat és több száz watt közötti elektromos áramot fogyasztanak. Mindkét rendszer dinamikusan és hatékonyan működik, de a stuttgarti modell energiafogyasztása jóval alacsonyabb és fontos betekintést nyújt az állatok anatómiájába is.
"Nem tudjuk feltárni egy élő állat gerincvelőjét, de a robotban le tudjuk modellezni. Elvileg tudjuk, hogy ezek a CPG-k léteznek az állatokban; tudjuk, hogy léteznek reflexek. De hogyan lehet a kettőt úgy kombinálni, hogy az állatok a reflexek és a CPG-k segítségével tanuljanak mozgásokat? Ez alapkutatás a robotika és a biológia határterületén. A robotmodell olyan kérdésekre ad választ, amelyekre a biológia önmagában nem tud választ adni" - szögezte le végül Alexander Badri-Spröwitz, a Dynamic Locomotion kutatócsoport vezetője.
Egy a vadonban születő zsiráfnak vagy zebrának a születése után nagyon gyorsan, percek alatt meg kell tanulnia használnia a lábait. Az állatok teljes felszereltséggel születnek, de az összes izom és ín tökéletes használatára irányuló koordináció csak tanulással jön létre. Amíg nem képesek önállóan menekülni a ragadozók elől, az újszülött állatbébik reflexeikre vannak utalva. A reflexek segítenek nekik elkerülni, hogy elessenek és megsérüljenek az első járási kísérleteik során. A pontos izomkontrollt gyakorolni kell, amíg egy bizonyos ponton a gerincvelő idegrendszere jól alkalmazkodik. Egy idő után megszűnik a kontrollálatlan botladozás - a fiatal állat képes lépést tartani felnőtt társaival.
A stuttgarti Max Planck Intelligens Rendszerek Intézete (MPI-IS) kutatói azt vizsgálták, hogyan tanulnak meg az állatok járni és botladozni. Ehhez építettek egy négylábú robotot, amely egy kutyára hasonlít. "Mérnökként és robotikusként egy olyan robot megépítésével kerestük a választ, amely olyan reflexekkel rendelkezik, mint egy állat, és tanul a hibákból. Ha egy állat megbotlik, az hiba? Nem, ha csak egyszer történik meg. De ha gyakran botladozik, az egyfajta mércét ad arról, hogy mennyire jól működik a járás" - nyilatkozta Felix Ruppert, az MPI-IS Dynamic Locomotion nevű kutatócsoportjának korábbi PhD-hallgatója.
Ruppert robotja a beindítás kezdetétől számítva mindössze egy óra alatt megtanulta a lehető legjobban használni a belső mechanikáját. Ez egy Bayes-féle optimalizációs tanulási algoritmussal működik: a lábakról származó szenzoros információkat (a tényleges adatokat) összevetik a számítógép vagy a virtuális gerincvelő céladataival. A robot úgy tanul meg járni, hogy a továbbított mozgásminták szerkezetét folyamatosan hozzáigazítja az érzékelőből érkező információkhoz.
A tanulási algoritmus befolyásolja a központi (mozgás)minta-generátort (CPG). Embereknél és állatoknál ezek a mintagenerátorok a gerincvelőben található idegsejtek hálózatai, amelyek az agy befolyása nélkül, önállóan okoznak ritmikus izomösszehúzódásokat. Ezek a neuronhálózatok fontos szerepet játszanak az olyan folyamatos mozgásokban, mint a járás, a pislogás vagy az emésztés. Az újszülött állatoknál nagyon könnyen látható, hogy a CPG-k még nem elég pontosan beállítottak. Amíg a fiatal állat tökéletesen sík felületen sétál, a CPG-k helyesen irányítják a gerincvelőből érkező mozgásjeleket. Egy kis ütközésnél ez gyorsan megváltozik; a reflexek beindulnak és úgy igazítják a mozgásmintákat, hogy az állat ne essen el.
A mozgásjelek e pillanatnyi változásai reverzibilisek, azaz "rugalmasak" és a mozgásminták a zavarás után visszatérnek eredeti konfigurációjukba. Ha azonban az állat - az aktív reflexek ellenére - több mozgáscikluson keresztül nem hagyja abba a botladozást, akkor a mozgásmintákat újra kell tanulni, mégpedig "plasztikusan", azaz visszafordíthatatlanul. Ugyanez a helyzet a "Morti" nevű labrador méretű robotkutyával. A mozgásmintáit azonban sokkal gyorsabban, körülbelül egy óra alatt optimalizálja.
A Morti CPG-t egy számítógépben szimulálják. Ez a virtuális gerincvelő a négylábúhoz ott csatlakozik, ahol a feje valójában lenne. Az alatt az egy óra alatt, amíg a robot zavartalanul fut, a lábakra erősített érzékelők adatait folyamatosan összehasonlítják a CPG jelekkel. Ha a robot megbotlik, a tanulási algoritmus megváltoztatja, hogy a lábak mennyire lengjenek előre-hátra, milyen gyorsan lengjenek és mennyi ideig maradjon egy láb a földön. A beállított lábmozgás befolyásolja, hogy a robot mennyire jól vagy rosszul tudja kihasználni a mechanikáját. A CPG adaptált jeleket küld, hogy a robot ezentúl a lehető legkevesebbet botladozzon, és így optimalizálja a járását. A virtuális gerincvelőnek nem kell tudnia, hogy a robot mesterséges izmokkal és inakkal rendelkezik. Semmit sem tud a gép fizikájáról.
"A robotunk allegorikusan születik, és semmit sem tud arról, hogyan működnek a lábai. A CPG úgy működik, mint egy beépített automata járási intelligencia, amelyet a természet biztosít számunkra, és amelyet átültettünk a robotba. A számítógép jeleket állít elő, amelyek a lábakhoz mennek. A robot sétál és botladozik. Ezek az adatok az érzékelőkből visszaáramlanak, és a számítógép összeveti őket, amely vakon generálja a mozgásmintákat. Ha az adatok nem felelnek meg az előírásoknak, akkor addig változtatja a járási viselkedést, amíg a botladozás nélküli járás nem működik. A tanulási folyamat az, hogy megváltoztassuk az alapértelmezettet, hogy mit kell tennie a lábaknak" - magyarázta Ruppert.
A csöppnyi számítógép a folyamat közben mindössze öt watt energiát fogyaszt. A neves gyártók hatalmas robotszerkezetei, amelyek összetett és bonyolult vezérlőrendszerek segítségével tanultak meg működni és amelyeknek pontos tömege és geometriája ismert, sokkal nagyobb energiaigényűek - általában több tucat és több száz watt közötti elektromos áramot fogyasztanak. Mindkét rendszer dinamikusan és hatékonyan működik, de a stuttgarti modell energiafogyasztása jóval alacsonyabb és fontos betekintést nyújt az állatok anatómiájába is.
"Nem tudjuk feltárni egy élő állat gerincvelőjét, de a robotban le tudjuk modellezni. Elvileg tudjuk, hogy ezek a CPG-k léteznek az állatokban; tudjuk, hogy léteznek reflexek. De hogyan lehet a kettőt úgy kombinálni, hogy az állatok a reflexek és a CPG-k segítségével tanuljanak mozgásokat? Ez alapkutatás a robotika és a biológia határterületén. A robotmodell olyan kérdésekre ad választ, amelyekre a biológia önmagában nem tud választ adni" - szögezte le végül Alexander Badri-Spröwitz, a Dynamic Locomotion kutatócsoport vezetője.