SG.hu·
Jobb kamerák, okosabb robotok
A jobb kamerák pozitív hatással vannak a robotok fejlődésére, mivel magabiztosabban irányíthatók és nagyobb hatékonysággal tudnak önállóan is tevékenykedni.
Az Amerikai Geofizikai Unió közleménye szerint a Mars Curiosity küldetésirányítói vezérlik a Földtől legtávolabbi robotokat, és hiába zajlik fénysebességgel a kommunikáció, az 567 millió kilométernyi távolság miatt 40 perc egy üzenetváltás, azaz napokig tart egy bonyolultabb tevékenység. A kamerák jelenleg csupán fényképeket tudnak készíteni, de a jobb felvevők és a robotok intelligenciájának jobb felkészítésével azonban mindez megváltozhat. "Jelenleg a felfedezés minden apró fázisát nekünk kell irányítanunk" - nyilatkozta a pasadenai JPL irányítóközpont számítógépes munkatársa, Kiri Wagstaff. A távolság növekedésével, egy aszterodia vagy egy üstökösre leszálló robot esetében ennél sokkal nagyobb önállóságra van szükség.

Az ilyen feladatok megoldását segítheti egy most fejlesztés alatt álló két lencsés kamera, a TextureCam. Jelenleg a Curiosity rovernek minden általa elkészített felvételt továbbítania kell a Földre, hogy elemezhessék az azon lévő sziklákat és egyéb objektumokat. Ezt a feladatot végezné el a TextureCam egymaga. Most a marsi világosság kezdetekor pontról - pontra megtervezik a teendőket, onnan kezdve hogy hány métert milyen irányba menjen a robot, csináljon-e ott felvételt és hogy utána ott merre forduljon. Ez már a 20 percre lévő Mars esetében is problémás, de a Jupiter holdja, az Europa esetében 90 perc lenne. Az időkülönbség már most is a kutatások egyik legfőbb korlátozó tényezője.
Az alacsony, alig 0,012 megabites Föld - Mars sávszélesség szintén nehezíti a helyzetet, ami a Mars körül keringő műholdak csak közvetlen rálátás idejére tudnak felgyorsítani. Egy-egy híres, újságokba is bekerülő, így kiváló PR célokat szolgáló panorámakép elkészítése hetekig tart. "Ha a robot önmaga el tudná választani a tudományosan érdekest az érdektelentől akkor radikálisan nőhetne az általunk megkapott hasznos fotók száma." - emelte ki Wagstaff.
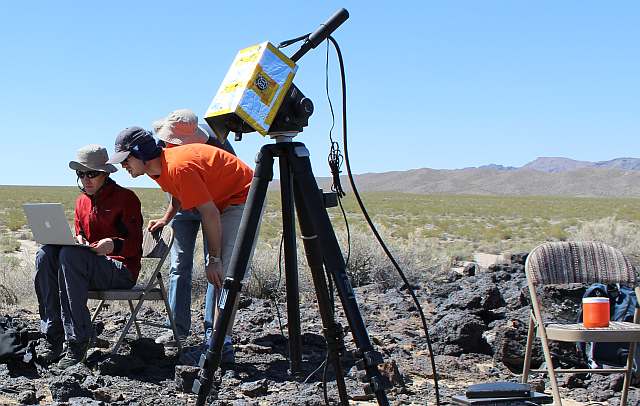
Ez lenne a TextureCam 3D sztereó kameráinak feladata. Ebben egy külön processzor venné le a képelemzés terhét a rover számítógépéről, elválasztva egymástól a homokot, a sziklákat és az eget. Ezután a kövek méretét és távolságát meghatározva eldönthető, melyek lehetnek a tudományosan érdekes objektumok. Érdekes célpont esetén a kamera jelezne a rover számítógépének, hogy haladjon tovább a szikla irányába és vegyen mintát belőle. A koncepció hasonló az okostelefonokban lévő arcfelismeréshez. A TextureCamet valódi űrbéli fényképeket használva tesztelték, illetve a marsi felszínhez nagyon hasonló környezetben, a dél-kaliforniai sivatagban is próbára tették. Wagstaff reményei szerint a következő küldetésekben, például a Mars 2020 roverben már a TextureCamet fogják használni.
Az Amerikai Geofizikai Unió közleménye szerint a Mars Curiosity küldetésirányítói vezérlik a Földtől legtávolabbi robotokat, és hiába zajlik fénysebességgel a kommunikáció, az 567 millió kilométernyi távolság miatt 40 perc egy üzenetváltás, azaz napokig tart egy bonyolultabb tevékenység. A kamerák jelenleg csupán fényképeket tudnak készíteni, de a jobb felvevők és a robotok intelligenciájának jobb felkészítésével azonban mindez megváltozhat. "Jelenleg a felfedezés minden apró fázisát nekünk kell irányítanunk" - nyilatkozta a pasadenai JPL irányítóközpont számítógépes munkatársa, Kiri Wagstaff. A távolság növekedésével, egy aszterodia vagy egy üstökösre leszálló robot esetében ennél sokkal nagyobb önállóságra van szükség.
Az ilyen feladatok megoldását segítheti egy most fejlesztés alatt álló két lencsés kamera, a TextureCam. Jelenleg a Curiosity rovernek minden általa elkészített felvételt továbbítania kell a Földre, hogy elemezhessék az azon lévő sziklákat és egyéb objektumokat. Ezt a feladatot végezné el a TextureCam egymaga. Most a marsi világosság kezdetekor pontról - pontra megtervezik a teendőket, onnan kezdve hogy hány métert milyen irányba menjen a robot, csináljon-e ott felvételt és hogy utána ott merre forduljon. Ez már a 20 percre lévő Mars esetében is problémás, de a Jupiter holdja, az Europa esetében 90 perc lenne. Az időkülönbség már most is a kutatások egyik legfőbb korlátozó tényezője.
Az alacsony, alig 0,012 megabites Föld - Mars sávszélesség szintén nehezíti a helyzetet, ami a Mars körül keringő műholdak csak közvetlen rálátás idejére tudnak felgyorsítani. Egy-egy híres, újságokba is bekerülő, így kiváló PR célokat szolgáló panorámakép elkészítése hetekig tart. "Ha a robot önmaga el tudná választani a tudományosan érdekest az érdektelentől akkor radikálisan nőhetne az általunk megkapott hasznos fotók száma." - emelte ki Wagstaff.
Ez lenne a TextureCam 3D sztereó kameráinak feladata. Ebben egy külön processzor venné le a képelemzés terhét a rover számítógépéről, elválasztva egymástól a homokot, a sziklákat és az eget. Ezután a kövek méretét és távolságát meghatározva eldönthető, melyek lehetnek a tudományosan érdekes objektumok. Érdekes célpont esetén a kamera jelezne a rover számítógépének, hogy haladjon tovább a szikla irányába és vegyen mintát belőle. A koncepció hasonló az okostelefonokban lévő arcfelismeréshez. A TextureCamet valódi űrbéli fényképeket használva tesztelték, illetve a marsi felszínhez nagyon hasonló környezetben, a dél-kaliforniai sivatagban is próbára tették. Wagstaff reményei szerint a következő küldetésekben, például a Mars 2020 roverben már a TextureCamet fogják használni.