SG.hu·
A szövetek feldolgozását is megtanulják a robotok

A gépek ügyesebben tudják kezelni a különböző szöveteket.
A legtöbb kísérlet arra, hogy a robotokat megtanítsák az anyagok kezelésére kamerák használatán alapul, azaz vizuális adatokat gyűjtenek. Az anyag típusa - legyen az finom selyem vagy durva gyapjú - nagyrészt rejtve marad. Az ilyen egyoldalú információkkal rendelkező gépek ennek megfelelően pontatlanok, amikor a szövetekkel kell manipulálniuk. A Carnegie Mellon Egyetem Robotikai Intézetének kutatói egy olyan technikát fejlesztettek ki, amely a robotokat textilfeldolgozásra teszi képessé. A rendszer egy tapintásérzékelő és egy egyszerű gépi tanulási algoritmus, az úgynevezett osztályozó használatán alapul. Az osztályozó az objektumokat bizonyos kategóriákhoz, jelen esetben szövetfajtákhoz rendeli.
A Daniel Seita informatikus és kollégái, Sashank Tirumala és Thomas Weng által kifejlesztett új módszer a ReSkin nevű tapintásérzékelő által gyűjtött adatokat használja, amely információkat gyűjt az anyag textúrájáról és a környezettel való kölcsönhatásáról. Ezen tapintási adatok alapján a csapat egy osztályozót képzett ki, amely meghatározta, hogy a robotnak milyen típusú szövetet és milyen egyéb tulajdonságokkal, például a szövetrétegek számával kell manipulálnia. "Ezt arra használjuk, hogy a megfogó nyitási szélességét az aktuális feladathoz igazítsuk" - emelte ki Weng.
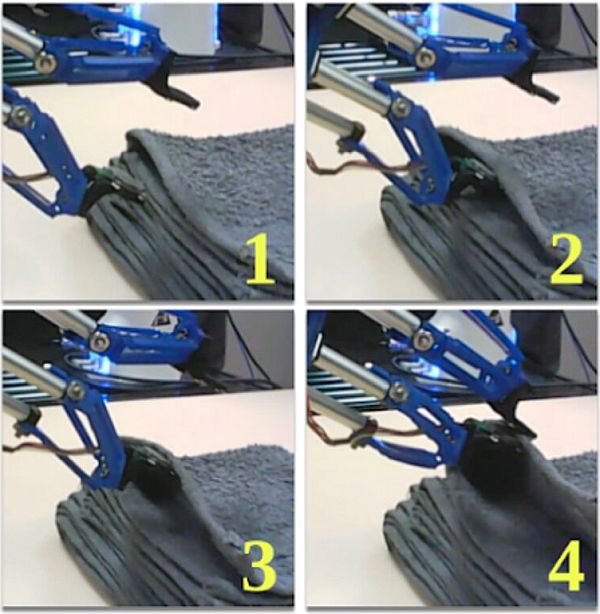
A csapat a technikájuk értékeléséhez 180 kísérletet végzett valós környezetben. Egy Franka robotkarból, egy mini Delta markolóból és a markoló "ujjába" integrált ReSkin érzékelőből álló rendszert használtak egy vagy két darab szövet megragadására egy kötegben. "A korábbi, csak kamerákat használó megközelítésekkel összehasonlítva a tapintásérzékelésen alapuló megközelítésünket nem befolyásolják a szöveten lévő minták, a fényviszonyok változása és egyéb vizuális eltérések" - nyilatkozta Tirumala. A cél a textiliparban vagy a mosodákban való használat.
A legtöbb kísérlet arra, hogy a robotokat megtanítsák az anyagok kezelésére kamerák használatán alapul, azaz vizuális adatokat gyűjtenek. Az anyag típusa - legyen az finom selyem vagy durva gyapjú - nagyrészt rejtve marad. Az ilyen egyoldalú információkkal rendelkező gépek ennek megfelelően pontatlanok, amikor a szövetekkel kell manipulálniuk. A Carnegie Mellon Egyetem Robotikai Intézetének kutatói egy olyan technikát fejlesztettek ki, amely a robotokat textilfeldolgozásra teszi képessé. A rendszer egy tapintásérzékelő és egy egyszerű gépi tanulási algoritmus, az úgynevezett osztályozó használatán alapul. Az osztályozó az objektumokat bizonyos kategóriákhoz, jelen esetben szövetfajtákhoz rendeli.
A Daniel Seita informatikus és kollégái, Sashank Tirumala és Thomas Weng által kifejlesztett új módszer a ReSkin nevű tapintásérzékelő által gyűjtött adatokat használja, amely információkat gyűjt az anyag textúrájáról és a környezettel való kölcsönhatásáról. Ezen tapintási adatok alapján a csapat egy osztályozót képzett ki, amely meghatározta, hogy a robotnak milyen típusú szövetet és milyen egyéb tulajdonságokkal, például a szövetrétegek számával kell manipulálnia. "Ezt arra használjuk, hogy a megfogó nyitási szélességét az aktuális feladathoz igazítsuk" - emelte ki Weng.
A csapat a technikájuk értékeléséhez 180 kísérletet végzett valós környezetben. Egy Franka robotkarból, egy mini Delta markolóból és a markoló "ujjába" integrált ReSkin érzékelőből álló rendszert használtak egy vagy két darab szövet megragadására egy kötegben. "A korábbi, csak kamerákat használó megközelítésekkel összehasonlítva a tapintásérzékelésen alapuló megközelítésünket nem befolyásolják a szöveten lévő minták, a fényviszonyok változása és egyéb vizuális eltérések" - nyilatkozta Tirumala. A cél a textiliparban vagy a mosodákban való használat.