SG.hu·
Jobban láthatnak majd a robotautók
Egy új platform segíthet az új technológiák tesztelésében és tökéletesítésében.
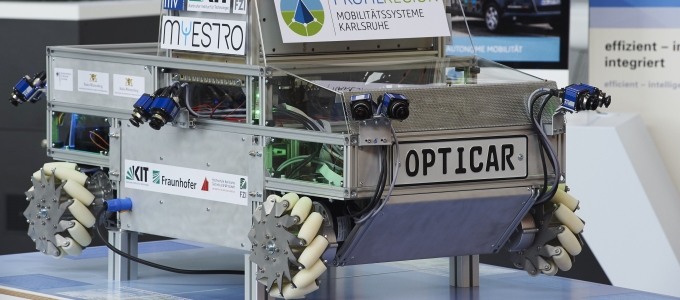
A Karlsruhei Technológiai Intézet (KIT), az FZI Informatikai Kutatóközpont és a MYESTRO Interactive GmbH szakemberei az OPTICAR kutatási projekt keretében egy olyan járművet fejlesztettek ki, amely az önállóan közlekedő gépkocsikhoz készített és a környezetet érzékelő új technológiák, elsősorban a sztereó kamerarendszerek kipróbálására szolgál. A program célja az, hogy a rendszerek precízebbek és robusztusabbak legyenek.
Matthias Pfriem, a KIT Járműrendszer-technikai Intézetének szakértője kijelentette, hogy az autók körüli közlekedési helyzet pontos felmérése meghatározó alapot jelent az autonóm gépkocsiknak a sikeres működtetéséhez. Az olyan szenzorrendszerek, mint a LiDAR, a radar és az ultrahullám mellett a széles látószögű sztereókamerák is felhasználhatók arra, hogy az önállóan közlekedő autók bármikor pontosan meghatározhassák saját és a környezetében lévő objektumok pozícióját azért, hogy precízen végrehajthassák a különböző manővereket, például egy előzést vagy egy sávváltást.
A sztereókamerák képei lehetővé teszik a környezet mélységi feltérképezését és többek között segítenek felmérni a különböző objektumok pontos pozícióit, távolságait és sebességeit. A tesztjárművet hat pár sztereókamerával látták el, amelyek nem csupán a közvetlen környezetet tudják feltérképezni. A különböző sztereókamera-párokba tartozó egyes készülékek virtuális összekötése lehetővé teszi továbbá akár a távolban lévő tárgyak pontos felmérését is.
A sztereókamerák a megszerzett adatokat Etherneten keresztül továbbítják a beágyazott, nagy teljesítményű képfeldolgozó számítógépeknek, amelyek valós időben és folyamatosan elkészítik a közlekedési helyzet összképét. Különleges kihívást jelentenek a karosszéria üzem közbeni kilengései, amelyek befolyásolják a kamerák pozícióját. A MYESTRO Interactive GmbH által megalkotott RubberStereo nevű technológia valós időben érzékeli és kompenzálja ezeket a kilengéseket, miután összehasonlítja egymással az egyes kamerapárok képi adatait.
Az OPTICAR egy nyitott platform így kiegészíthető radarral, digitális térképekkel vagy akár Car2X kommunikációs rendszerekkel is.
A Karlsruhei Technológiai Intézet (KIT), az FZI Informatikai Kutatóközpont és a MYESTRO Interactive GmbH szakemberei az OPTICAR kutatási projekt keretében egy olyan járművet fejlesztettek ki, amely az önállóan közlekedő gépkocsikhoz készített és a környezetet érzékelő új technológiák, elsősorban a sztereó kamerarendszerek kipróbálására szolgál. A program célja az, hogy a rendszerek precízebbek és robusztusabbak legyenek.
Matthias Pfriem, a KIT Járműrendszer-technikai Intézetének szakértője kijelentette, hogy az autók körüli közlekedési helyzet pontos felmérése meghatározó alapot jelent az autonóm gépkocsiknak a sikeres működtetéséhez. Az olyan szenzorrendszerek, mint a LiDAR, a radar és az ultrahullám mellett a széles látószögű sztereókamerák is felhasználhatók arra, hogy az önállóan közlekedő autók bármikor pontosan meghatározhassák saját és a környezetében lévő objektumok pozícióját azért, hogy precízen végrehajthassák a különböző manővereket, például egy előzést vagy egy sávváltást.
A sztereókamerák képei lehetővé teszik a környezet mélységi feltérképezését és többek között segítenek felmérni a különböző objektumok pontos pozícióit, távolságait és sebességeit. A tesztjárművet hat pár sztereókamerával látták el, amelyek nem csupán a közvetlen környezetet tudják feltérképezni. A különböző sztereókamera-párokba tartozó egyes készülékek virtuális összekötése lehetővé teszi továbbá akár a távolban lévő tárgyak pontos felmérését is.
A sztereókamerák a megszerzett adatokat Etherneten keresztül továbbítják a beágyazott, nagy teljesítményű képfeldolgozó számítógépeknek, amelyek valós időben és folyamatosan elkészítik a közlekedési helyzet összképét. Különleges kihívást jelentenek a karosszéria üzem közbeni kilengései, amelyek befolyásolják a kamerák pozícióját. A MYESTRO Interactive GmbH által megalkotott RubberStereo nevű technológia valós időben érzékeli és kompenzálja ezeket a kilengéseket, miután összehasonlítja egymással az egyes kamerapárok képi adatait.
Az OPTICAR egy nyitott platform így kiegészíthető radarral, digitális térképekkel vagy akár Car2X kommunikációs rendszerekkel is.