SG.hu·
Robotok gyűjthetik az adatokat a tengerek mélyéről
A rajok bevetett víz alatti gépek célzottan szedhetik össze minden mélységből a környezetvédelmi információkat.
A Kaliforniai Technológiai Intézet (Caltech), az ETH Zürich és a Harvard Egyetem kutatói a gépi tanulás egyik formáját hívták segítségül azért, hogy a jövőben könnyebben lehessen a mélytengeri adatokhoz hozzáférni.
John O. Dabiri, a Caltech professzora úgy foglalta össze a helyzetet, hogy a jelenlegi merülési robotoknak azért nem szállíthatók a helyi tengeráramlatokkal kapcsolatos olyan adatok, amelyekre a navigációhoz lenne szükségük, mert ezek az információk a felszínről nem ismerhetők fel. Problémát jelent az is, hogy a robotok nem távirányíthatók, ezért az útjukat saját maguknak kell megtalálniuk. A navigációban segítséget jelentő adatokat most a fedélzeti szenzoraikkal kell összegyűjteniük és azok alapján kell eldönteniük, hogy hová akarnak eljutni és az adott utat miként tehetik meg a leghatékonyabban.
A megalkotott új módszerrel a gépek stratégiákat dolgoznak ki, majd azokat megvalósítják. Amennyiben egy stratégia célravezető, akkor van virtuális jutalom. Az emberek esetében ezt úgy lehetne mondani, hogy tapasztalatokat gyűjtöttek. A robot a megszerzett tapasztalatokat arra használja fel, hogy optimálisan haladjon. A szükséges szoftver adatait a 30 dollárba kerülő Teensy nevű mikrovezérlő dolgozza fel. Ennek 0,5 wattos teljesítményfelvétele olyan alacsony, hogy egyetlen akkumulátor is hosszú ideig biztosítani tudja a működéséhez szükséges energiát. A program egy szimuláció során megtanulta, hogy miként használja fel a vízben lévő örvényeket és áramlásokat a mozgáshoz.
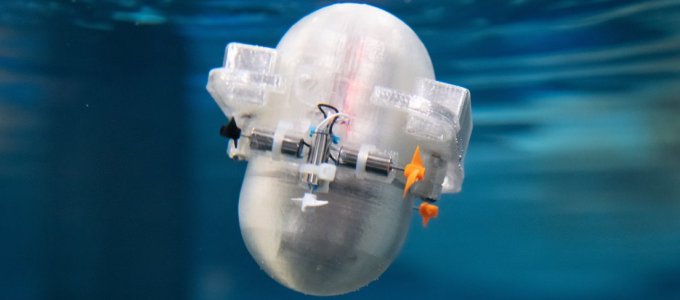
A szakembereket meglepte, hogy az általuk kifejlesztett algoritmus képes volt megtanulni a különböző navigációs stratégiákat, amelyek még hatékonyabbak az óceáni halak által használtaknál. A fejlesztők az elvégzett teszt során a Teensy-t egy vízálló csomagolásban helyezték el és az egységet CARL-Bot-nak nevezték el. Az új rendszert a Caltech campusán vizsgálják tovább.
A Kaliforniai Technológiai Intézet (Caltech), az ETH Zürich és a Harvard Egyetem kutatói a gépi tanulás egyik formáját hívták segítségül azért, hogy a jövőben könnyebben lehessen a mélytengeri adatokhoz hozzáférni.
John O. Dabiri, a Caltech professzora úgy foglalta össze a helyzetet, hogy a jelenlegi merülési robotoknak azért nem szállíthatók a helyi tengeráramlatokkal kapcsolatos olyan adatok, amelyekre a navigációhoz lenne szükségük, mert ezek az információk a felszínről nem ismerhetők fel. Problémát jelent az is, hogy a robotok nem távirányíthatók, ezért az útjukat saját maguknak kell megtalálniuk. A navigációban segítséget jelentő adatokat most a fedélzeti szenzoraikkal kell összegyűjteniük és azok alapján kell eldönteniük, hogy hová akarnak eljutni és az adott utat miként tehetik meg a leghatékonyabban.
A megalkotott új módszerrel a gépek stratégiákat dolgoznak ki, majd azokat megvalósítják. Amennyiben egy stratégia célravezető, akkor van virtuális jutalom. Az emberek esetében ezt úgy lehetne mondani, hogy tapasztalatokat gyűjtöttek. A robot a megszerzett tapasztalatokat arra használja fel, hogy optimálisan haladjon. A szükséges szoftver adatait a 30 dollárba kerülő Teensy nevű mikrovezérlő dolgozza fel. Ennek 0,5 wattos teljesítményfelvétele olyan alacsony, hogy egyetlen akkumulátor is hosszú ideig biztosítani tudja a működéséhez szükséges energiát. A program egy szimuláció során megtanulta, hogy miként használja fel a vízben lévő örvényeket és áramlásokat a mozgáshoz.
A szakembereket meglepte, hogy az általuk kifejlesztett algoritmus képes volt megtanulni a különböző navigációs stratégiákat, amelyek még hatékonyabbak az óceáni halak által használtaknál. A fejlesztők az elvégzett teszt során a Teensy-t egy vízálló csomagolásban helyezték el és az egységet CARL-Bot-nak nevezték el. Az új rendszert a Caltech campusán vizsgálják tovább.