SG.hu·
Hálózatba kötött robotokkal tisztítanák meg a szeméttől a tengereket

Az önállóan dolgozó víz alatti járművek segíthetnek a hulladékok feltérképezésében és osztályozásában is.
A világ legnagyobb civil természetvédelmi szervezetének számító World Wide Fun for Nature (WWF) becslései alapján 86 millió tonna műanyag úszik világszerte az óceánokban. Mindez katasztrofális következményekkel jár a tengeri állatokra, a környezetre és végeredményben az emberekre nézve. A műanyag szemét 90 százaléka a tengerfenékre kerül. A Fraunhofer Társaság Tengeri Logisztikai és Szolgáltatások Központja nemzetközi partnerekkel közösen a SeaClear projekt keretében akarja a lehető legtöbb műanyag hulladékot eltávolítani. A kifejlesztett technológiákat többek között a hamburgi kikötőben fogják tesztelni, s Dubrovnik partjainál is alkalmazzák majd.
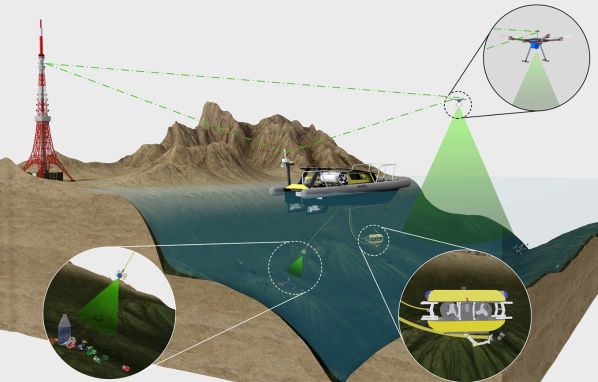
Johannes Oeffner és Cosmin Delea, a projekt felelősei elmondták, hogy a SeaClear rendszerben számos különböző robotjármű lesz egymással hálózatba kötve. A munka során az autonóm vagy távirányított robotanyahajót két víz alatti robot és egy drón fogja támogatni.
Oeffner rámutatott, hogy a tengerek szennyezése az egyik legfontosabb globális probléma, amely hatással van a környezetre, a gazdaságra, a biztonságra, az egészségre és a kultúrára. Mivel a műanyagok nehezen bomlanak le, ezért akár több száz évig is megmaradnak az óceánokban. Amennyiben figyelembe vesszük, hogy az előrejelzések szerint a műanyaggyártás 2050-re a négyszeresére fog nőni, akkor látható, hogy az emberiségnek hatalmas problémával kell szembenéznie akkor, ha nem cselekszik.
A Világgazdasági Fórum adatai szerint a műanyag és a halak aránya 2014-ben 1 az 5-höz volt, de 2050-re már ugyanannyi műanyag hulladék lehet, mint a hal. A szakemberek először a tengerfenék tisztítására koncentrálnak majd, különösen azokon a part menti területeken, ahol a szennyezés különösen magas. Az alkalmazandó drón és az egyik víz alatti robot segítségével feltérképezik a felszínen és a vízben található szemeteket, majd a második víz alatti robot ezen információkat felhasználva gyűjti össze a hulladékokat egy markoló karral és egy szívóeszközzel a tengerfenéken, s elviszi azokat a közeli hajón elhelyezett gyűjtőedénybe.
Delea kifejtette, hogy több ágenses vezérlési technológiákat alkalmaznak az összes autonóm jármű szinkronvezérléséhez. Ez azt jelenti, hogy a robot helyzetének változását a többi gépnek is meg kell erősítenie. Minden robot rendelkezik beépített funkcióval, amely emberi beavatkozás nélkül képes feldolgozni ezeket a változásokat. Mélytanulási algoritmusokat fognak használni a tengeri hulladékok azonosítására és osztályozására. Továbbá különböző rendszereket, például hagyományos és multispektrális kamerákat vagy akusztikus érzékelőket ötvöznek annak érdekében, hogy fontos adatokat szerezzenek a vizekről, s megfelelően felismerjék és osztályozzák a szemetet. Mindkét folyamat esetében nyilvánosan elérhető forrásokból, például online adatbázisokból származó információkat használnak fel.
Oeffner hangsúlyozta, hogy jelenleg két helyszínen tesztelik a technológiákat, két különböző forgatókönyv szerint, egyaránt 20-30 méteres mélységben. A hamburgi kikötőben egy folyamatban lévő kikötői műveletet szeretnének bemutatni meglévő infrastruktúrával és rögzített folyamatokkal. A Dubrovnikban található tengerparti forgatókönyv pedig az idegenforgalomra vonatkozik és a kifejezetten a turisták által látogatott partok vizének a tisztítását célozza. Az első vizsgálatokat mindkét területen tavasszal végezték.
Delea hozzátette, hogy a két helyszínen különbözők a kihívások: a hamburgi kikötő vize zavaros és a látási viszonyok korlátozottak. Mivel azt a vizet rendkívül nehéz elemezni, ezért ott elsősorban akusztikus érzékelőket használnak. Fontos, hogy még robusztusabbá akarják tenni a SeaClear rendszert és emellett vizsgálják, hogy a megoldást miként lehetne hasznosítani a jövőben kikötői szolgáltatásként. A projektben a müncheni, a delfti, a dubrovniki és a kolozsvári műszaki egyetemek, valamint a SubSea Tech Marseille, a hamburgi kikötői hatóság és a DUNEA Dubrovnik regionális fejlesztési ügynökség vesznek még részt. A cél az, hogy a projekt lezárása után az utóbbi kettő működtesse és használja a kifejlesztett infrastruktúrát.
A világ legnagyobb civil természetvédelmi szervezetének számító World Wide Fun for Nature (WWF) becslései alapján 86 millió tonna műanyag úszik világszerte az óceánokban. Mindez katasztrofális következményekkel jár a tengeri állatokra, a környezetre és végeredményben az emberekre nézve. A műanyag szemét 90 százaléka a tengerfenékre kerül. A Fraunhofer Társaság Tengeri Logisztikai és Szolgáltatások Központja nemzetközi partnerekkel közösen a SeaClear projekt keretében akarja a lehető legtöbb műanyag hulladékot eltávolítani. A kifejlesztett technológiákat többek között a hamburgi kikötőben fogják tesztelni, s Dubrovnik partjainál is alkalmazzák majd.
Johannes Oeffner és Cosmin Delea, a projekt felelősei elmondták, hogy a SeaClear rendszerben számos különböző robotjármű lesz egymással hálózatba kötve. A munka során az autonóm vagy távirányított robotanyahajót két víz alatti robot és egy drón fogja támogatni.
Oeffner rámutatott, hogy a tengerek szennyezése az egyik legfontosabb globális probléma, amely hatással van a környezetre, a gazdaságra, a biztonságra, az egészségre és a kultúrára. Mivel a műanyagok nehezen bomlanak le, ezért akár több száz évig is megmaradnak az óceánokban. Amennyiben figyelembe vesszük, hogy az előrejelzések szerint a műanyaggyártás 2050-re a négyszeresére fog nőni, akkor látható, hogy az emberiségnek hatalmas problémával kell szembenéznie akkor, ha nem cselekszik.
A Világgazdasági Fórum adatai szerint a műanyag és a halak aránya 2014-ben 1 az 5-höz volt, de 2050-re már ugyanannyi műanyag hulladék lehet, mint a hal. A szakemberek először a tengerfenék tisztítására koncentrálnak majd, különösen azokon a part menti területeken, ahol a szennyezés különösen magas. Az alkalmazandó drón és az egyik víz alatti robot segítségével feltérképezik a felszínen és a vízben található szemeteket, majd a második víz alatti robot ezen információkat felhasználva gyűjti össze a hulladékokat egy markoló karral és egy szívóeszközzel a tengerfenéken, s elviszi azokat a közeli hajón elhelyezett gyűjtőedénybe.
Delea kifejtette, hogy több ágenses vezérlési technológiákat alkalmaznak az összes autonóm jármű szinkronvezérléséhez. Ez azt jelenti, hogy a robot helyzetének változását a többi gépnek is meg kell erősítenie. Minden robot rendelkezik beépített funkcióval, amely emberi beavatkozás nélkül képes feldolgozni ezeket a változásokat. Mélytanulási algoritmusokat fognak használni a tengeri hulladékok azonosítására és osztályozására. Továbbá különböző rendszereket, például hagyományos és multispektrális kamerákat vagy akusztikus érzékelőket ötvöznek annak érdekében, hogy fontos adatokat szerezzenek a vizekről, s megfelelően felismerjék és osztályozzák a szemetet. Mindkét folyamat esetében nyilvánosan elérhető forrásokból, például online adatbázisokból származó információkat használnak fel.
Oeffner hangsúlyozta, hogy jelenleg két helyszínen tesztelik a technológiákat, két különböző forgatókönyv szerint, egyaránt 20-30 méteres mélységben. A hamburgi kikötőben egy folyamatban lévő kikötői műveletet szeretnének bemutatni meglévő infrastruktúrával és rögzített folyamatokkal. A Dubrovnikban található tengerparti forgatókönyv pedig az idegenforgalomra vonatkozik és a kifejezetten a turisták által látogatott partok vizének a tisztítását célozza. Az első vizsgálatokat mindkét területen tavasszal végezték.
Delea hozzátette, hogy a két helyszínen különbözők a kihívások: a hamburgi kikötő vize zavaros és a látási viszonyok korlátozottak. Mivel azt a vizet rendkívül nehéz elemezni, ezért ott elsősorban akusztikus érzékelőket használnak. Fontos, hogy még robusztusabbá akarják tenni a SeaClear rendszert és emellett vizsgálják, hogy a megoldást miként lehetne hasznosítani a jövőben kikötői szolgáltatásként. A projektben a müncheni, a delfti, a dubrovniki és a kolozsvári műszaki egyetemek, valamint a SubSea Tech Marseille, a hamburgi kikötői hatóság és a DUNEA Dubrovnik regionális fejlesztési ügynökség vesznek még részt. A cél az, hogy a projekt lezárása után az utóbbi kettő működtesse és használja a kifejlesztett infrastruktúrát.