SG.hu·
Dugókat fognak okozni az autonóm autók
A közlekedési helyzet megváltozásához és javulásához sokkal több kell annál, hogy elterjedjenek az utakon a robotjárművek.
A Waymo az elmúlt években Phoenix útjain tesztelte autonóm járműveit és gyakori volt, hogy azok látszólag minden ok nélkül fékeztek, illetve megálltak. A szoftver- és mesterséges intelligencia szakértők végül megtalálták a probléma okát: a madarakat. A járművek ugyanis az állatokat akadályoknak tartották és minden egyes alkalommal fékeztek, amikor egy madár közeledett hozzájuk. A Waymo végül megoldotta a problémát azáltal, hogy tovább fejlesztette az algoritmust.
Ez a példa tökéletesen megmutatja, hogy a fejlesztőknek bőven van még dolguk, miként arra is rávilágít, hogy az autonóm autók annyira mereven követik a közlekedési szabályokat, hogy emiatt teljesen másként viselkednek, mint az emberek. A neurális hálózatokat ugyanis az elővigyázatosság alapján készítik fel, vagyis hogy tartsanak nagyobb követési távolságot, lassabban gyorsítsanak vagy hosszabb ideig álljanak meg a kereszteződésekben. A lényeg: ezek a rendszerek rendkívül defenzív módon közlekednek.
A PTV szoftvercég szimulációi azt mutatták, hogy ennek a gyakorlatnak következményei lesznek a mindennapi közlekedésre. Már az is megzavarhatja a forgalmat, ha az autonóm gépkocsik aránya 20 százalék. Amennyiben 50 százalék, akkor a kétszeresére nőhet a dugók aránya. Jochen Lohmiller, a PTV projektvezetője azt mondta, hogy ezek a dolgok semmi jót nem vetítenek előre a városok számára.
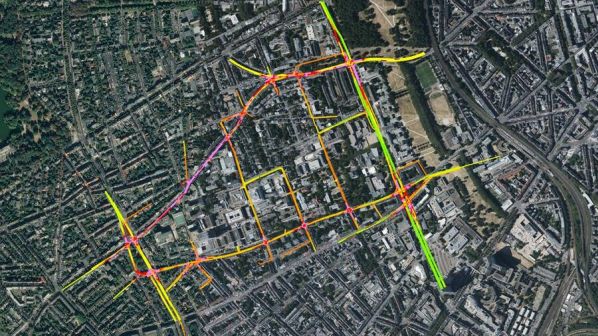
A kutatók a jövőt az úgynevezett digitális ikrekben látják. Ez azt jelenti, hogy az utakat kamerákkal, radarokkal, LiDAR-egységekkel és más szenzorokkal figyelik, majd az anonimizált (rendszámtáblák nélküli) adatokat mesterséges intelligencia segítségével dolgozzák fel, így létrejön a forgalom digitális lenyomata. Ez a valós idejű 3D térkép lehetővé teszi az útvonalak hatékonyabb megtervezését és a forgalom áteresztőképességének a növelését. Alois Knoll, a Müncheni Műszaki Egyetem Robotikai, Mesterséges Intelligencia és Valós idejű rendszerek Tanszékének vezetője kijelentette, hogy mindez rendkívül fontos az úthálózat fenntarthatósága szempontjából.
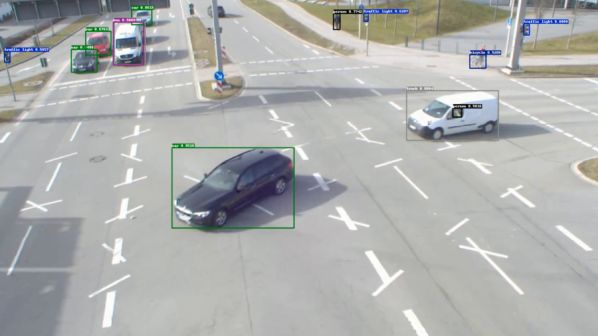
A forgalom valós idejű figyelésére és elemzésére lenne szükség
Az autonóm járművek tudnak javítani a forgalmon, de csak akkor, ha az arányuk jóval több mint 50 százalék. Akkor ugyanis a hálózatba kötött autók egymás között koordinálhatják a mozgásukat, beállhatnak egy optimális sebességre és kiszámíthatják, illetve szűkíthetik egymás között a követési távolságokat. A közlekedési szakemberek szerint semmi sem jobb a forgalom lebonyolítása szempontjából, mint az egyenletesen mozgó járművek. A probléma az autonóm autók és az emberek által vezetett autók közötti interakcióban rejlik.
Knoll szerint az emberek egyszerűen eltérő módon reagálnak a különböző helyzetekre. A közlekedési lámpáknál például harmonika effektus van. A sofőrök nem egyszerre, hanem szakaszosan indulnak el, egyre nagyobbak a távolságok a járművek között, és egy zöld lámpánál kevesebb autó fér át. Ez nem segíti az átállást, amely még akkor is 10 évig tarthatna, ha minden napjainkban forgalomba helyezett személy- és tehergépkocsi SAE Level 5-ös szintű, vagyis teljesen automatizált lenne.
A helyzet sürgető, nincs sok idejük a közlekedésmérnököknek, mert az autonóm vezetés már nem jövőkép. Az új Mercedes S-osztállyal már 60 kilométer/órás sebességgel is lehet haladni egy bedugult autópályán anélkül, hogy a sofőrnek a kormányon kellene tartania a kezét. Ez az úgynevezett Level 3, és készen áll a sorozatgyártásra. Itt bizonyos körülmények között a vezető feladja az irányítást a jármű felett, de készen kell állnia arra, hogy bármikor újra be kell avatkoznia. A teljesen autonóm vezetés 4. szinten való megvalósítása technológiailag bonyolultabb, de még ennél is összetéveszthetetlen a haladás az emberekkel, amint azt számos tesztprojekt mutatja világszerte. A legmagasabb, 5-ös szinten a kormány és a vezető teljesen felesleges. Valószínűleg sok évnek kell eltelnie, mire az autonómia ezen szintje a mindennapi élet részévé válik.
A PTV szimulációi alapján, ha az összes közlekedő jármű 20 százaléka autonóm, akkor az átlagos sebesség 23,5-ről 20,9 kilométer/órára csökken. A PTV például Kölnben 58 km/h átlagsebességet állapított meg az emberi sofőröknél. Ez a lakott területen megengedettnél gyorsabb. Az autonóm járművek viszont pontosan 49 km/h-val követik az előírást. De ha az arány 50 százalék, akkor az egyirányú utcákban alig lehet haladni, fékezni is csak lassan és nagyobb követési távolságot kell betartani. A megállások száma átlagosan 1,8-ról 3,3 nő, amely 80 százalékos növekedésnek felel meg. Ráadásul az autonóm autók nélküli közlekedésben a dugók hossza 55 méter, míg ha az arányuk 50 százalék, akkor 114 méter.
Lohmiller hangsúlyozta, hogy a városoknak el kell gondolkodniuk, mert az új technika megjelenésével és elterjedésével közel sem lesz minden automatikusan jobb. Az egyik megoldást jelenthetik az autonóm gépkocsiknak kialakított forgalmi sávok, de azokra nem mindig jut elegendő hely, másrészt a számuk növekedni fog, azaz nem ez a jó irány. Az ember által vezetett járművek betiltásának radikálisabb ötlete valószínűleg nem lesz politikailag megvalósítható a belátható jövőben.
A szimulációk szerint az autonóm járművek megjelenése rontani fog a forgalom áramlásán, és csak 50 százalék feletti arányuknál észlelhetők a kedvező hatások
Knoll úgy vélte, ahhoz, hogy a legfontosabb német autópályákon kialakítsák a digitális ikrek rendszert, kereken 1 milliárd euró kellene. 150 és 500 méterenként egy-egy olyan szenzort kellene felszerelni, amely képes a forgalmat valós időben leképezni. Így nagy pontossággal megtervezhetővé válik a következő 60 perc forgalma, aktiválhatók a közlekedési rendszerek, optimalizálhatók a közlekedési lámpák fázisai és átirányíthatók a robotgépkocsik. Sőt, elvileg központilag vezérelhetővé válnak az autonóm járművek is. Ezáltal egységes lehet a sebességük és magas maradhat a forgalom áteresztőképessége. Knoll rámutatott, hogy ez már Kínában működik.
A hosszú távú hatások még fontosabbak lehetnek: a hatóságok és az úthálózatok üzemeltetői gyorsabban reagálhatnának a balesetekre és a dugókra, ráadásul kevesebb utat kellene építeni a hasonló mértékű forgalom elvezetésére. Így sokkal jobban lehetne kihasználni a rendelkezésre álló közlekedési felületet. Ez összességében kevesebb dugót és költséget jelentene.
A Deloitte 2019-ben azt taglalta, hogy az önállóan közlekedő taxik 2035-ig jelentős mértékben növelhetik a belvárosi gépkocsi-forgalmat. 2020 októberében pedig a Bécsi Műszaki Egyetem munkatársai állapították meg, hogy forgalomnövekedést okoznak majd az autonóm autók.
A Waymo az elmúlt években Phoenix útjain tesztelte autonóm járműveit és gyakori volt, hogy azok látszólag minden ok nélkül fékeztek, illetve megálltak. A szoftver- és mesterséges intelligencia szakértők végül megtalálták a probléma okát: a madarakat. A járművek ugyanis az állatokat akadályoknak tartották és minden egyes alkalommal fékeztek, amikor egy madár közeledett hozzájuk. A Waymo végül megoldotta a problémát azáltal, hogy tovább fejlesztette az algoritmust.
Ez a példa tökéletesen megmutatja, hogy a fejlesztőknek bőven van még dolguk, miként arra is rávilágít, hogy az autonóm autók annyira mereven követik a közlekedési szabályokat, hogy emiatt teljesen másként viselkednek, mint az emberek. A neurális hálózatokat ugyanis az elővigyázatosság alapján készítik fel, vagyis hogy tartsanak nagyobb követési távolságot, lassabban gyorsítsanak vagy hosszabb ideig álljanak meg a kereszteződésekben. A lényeg: ezek a rendszerek rendkívül defenzív módon közlekednek.
A PTV szoftvercég szimulációi azt mutatták, hogy ennek a gyakorlatnak következményei lesznek a mindennapi közlekedésre. Már az is megzavarhatja a forgalmat, ha az autonóm gépkocsik aránya 20 százalék. Amennyiben 50 százalék, akkor a kétszeresére nőhet a dugók aránya. Jochen Lohmiller, a PTV projektvezetője azt mondta, hogy ezek a dolgok semmi jót nem vetítenek előre a városok számára.
A kutatók a jövőt az úgynevezett digitális ikrekben látják. Ez azt jelenti, hogy az utakat kamerákkal, radarokkal, LiDAR-egységekkel és más szenzorokkal figyelik, majd az anonimizált (rendszámtáblák nélküli) adatokat mesterséges intelligencia segítségével dolgozzák fel, így létrejön a forgalom digitális lenyomata. Ez a valós idejű 3D térkép lehetővé teszi az útvonalak hatékonyabb megtervezését és a forgalom áteresztőképességének a növelését. Alois Knoll, a Müncheni Műszaki Egyetem Robotikai, Mesterséges Intelligencia és Valós idejű rendszerek Tanszékének vezetője kijelentette, hogy mindez rendkívül fontos az úthálózat fenntarthatósága szempontjából.
A forgalom valós idejű figyelésére és elemzésére lenne szükség
Az autonóm járművek tudnak javítani a forgalmon, de csak akkor, ha az arányuk jóval több mint 50 százalék. Akkor ugyanis a hálózatba kötött autók egymás között koordinálhatják a mozgásukat, beállhatnak egy optimális sebességre és kiszámíthatják, illetve szűkíthetik egymás között a követési távolságokat. A közlekedési szakemberek szerint semmi sem jobb a forgalom lebonyolítása szempontjából, mint az egyenletesen mozgó járművek. A probléma az autonóm autók és az emberek által vezetett autók közötti interakcióban rejlik.
Knoll szerint az emberek egyszerűen eltérő módon reagálnak a különböző helyzetekre. A közlekedési lámpáknál például harmonika effektus van. A sofőrök nem egyszerre, hanem szakaszosan indulnak el, egyre nagyobbak a távolságok a járművek között, és egy zöld lámpánál kevesebb autó fér át. Ez nem segíti az átállást, amely még akkor is 10 évig tarthatna, ha minden napjainkban forgalomba helyezett személy- és tehergépkocsi SAE Level 5-ös szintű, vagyis teljesen automatizált lenne.
A helyzet sürgető, nincs sok idejük a közlekedésmérnököknek, mert az autonóm vezetés már nem jövőkép. Az új Mercedes S-osztállyal már 60 kilométer/órás sebességgel is lehet haladni egy bedugult autópályán anélkül, hogy a sofőrnek a kormányon kellene tartania a kezét. Ez az úgynevezett Level 3, és készen áll a sorozatgyártásra. Itt bizonyos körülmények között a vezető feladja az irányítást a jármű felett, de készen kell állnia arra, hogy bármikor újra be kell avatkoznia. A teljesen autonóm vezetés 4. szinten való megvalósítása technológiailag bonyolultabb, de még ennél is összetéveszthetetlen a haladás az emberekkel, amint azt számos tesztprojekt mutatja világszerte. A legmagasabb, 5-ös szinten a kormány és a vezető teljesen felesleges. Valószínűleg sok évnek kell eltelnie, mire az autonómia ezen szintje a mindennapi élet részévé válik.
A PTV szimulációi alapján, ha az összes közlekedő jármű 20 százaléka autonóm, akkor az átlagos sebesség 23,5-ről 20,9 kilométer/órára csökken. A PTV például Kölnben 58 km/h átlagsebességet állapított meg az emberi sofőröknél. Ez a lakott területen megengedettnél gyorsabb. Az autonóm járművek viszont pontosan 49 km/h-val követik az előírást. De ha az arány 50 százalék, akkor az egyirányú utcákban alig lehet haladni, fékezni is csak lassan és nagyobb követési távolságot kell betartani. A megállások száma átlagosan 1,8-ról 3,3 nő, amely 80 százalékos növekedésnek felel meg. Ráadásul az autonóm autók nélküli közlekedésben a dugók hossza 55 méter, míg ha az arányuk 50 százalék, akkor 114 méter.
Lohmiller hangsúlyozta, hogy a városoknak el kell gondolkodniuk, mert az új technika megjelenésével és elterjedésével közel sem lesz minden automatikusan jobb. Az egyik megoldást jelenthetik az autonóm gépkocsiknak kialakított forgalmi sávok, de azokra nem mindig jut elegendő hely, másrészt a számuk növekedni fog, azaz nem ez a jó irány. Az ember által vezetett járművek betiltásának radikálisabb ötlete valószínűleg nem lesz politikailag megvalósítható a belátható jövőben.
A szimulációk szerint az autonóm járművek megjelenése rontani fog a forgalom áramlásán, és csak 50 százalék feletti arányuknál észlelhetők a kedvező hatások
Knoll úgy vélte, ahhoz, hogy a legfontosabb német autópályákon kialakítsák a digitális ikrek rendszert, kereken 1 milliárd euró kellene. 150 és 500 méterenként egy-egy olyan szenzort kellene felszerelni, amely képes a forgalmat valós időben leképezni. Így nagy pontossággal megtervezhetővé válik a következő 60 perc forgalma, aktiválhatók a közlekedési rendszerek, optimalizálhatók a közlekedési lámpák fázisai és átirányíthatók a robotgépkocsik. Sőt, elvileg központilag vezérelhetővé válnak az autonóm járművek is. Ezáltal egységes lehet a sebességük és magas maradhat a forgalom áteresztőképessége. Knoll rámutatott, hogy ez már Kínában működik.
A hosszú távú hatások még fontosabbak lehetnek: a hatóságok és az úthálózatok üzemeltetői gyorsabban reagálhatnának a balesetekre és a dugókra, ráadásul kevesebb utat kellene építeni a hasonló mértékű forgalom elvezetésére. Így sokkal jobban lehetne kihasználni a rendelkezésre álló közlekedési felületet. Ez összességében kevesebb dugót és költséget jelentene.
A Deloitte 2019-ben azt taglalta, hogy az önállóan közlekedő taxik 2035-ig jelentős mértékben növelhetik a belvárosi gépkocsi-forgalmat. 2020 októberében pedig a Bécsi Műszaki Egyetem munkatársai állapították meg, hogy forgalomnövekedést okoznak majd az autonóm autók.
