SG.hu·
A robotika új fejezetet nyit Pompeji újjászületésében
Pompeji évezredeken át elveszettnek hitt freskói ma soha nem látott eséllyel kaphatnak új életet, mégpedig egy olyan robotrendszer segítségével, amely alapjaiban alakíthatja át a műemléki restaurálás gyakorlatát.
A RePAIR nevű, EU-finanszírozott projekt célja, hogy felgyorsítsa és pontosabbá tegye azt a rendkívül lassú és gyakran frusztráló folyamatot, amely során a régészek és restaurátorok a széttört műtárgyak apró darabjait próbálják újra összeilleszteni. A kutatás 2021-ben indult a velencei Ca’ Foscari Egyetem koordinálásával, és most Pompejiben mutatták be, ahol a nemzetközi kutatócsoportok az ősi romvárost használták kísérleti terepként. A projekt megszületését egy nagyon is gyakorlati igény indította el: számos, a második világháborús bombázások során szétszakadt freskó máig szétszórt darabjai várták, hogy újra összeállhassanak. Pompeji igazgatója, Gabriel Zuchtriegel szerint az ilyen töredékek kézi összeillesztése hagyományosan évekig, akár évtizedekig is eltarthat, ezért a robotikus megoldás jelentős előrelépést kínál.
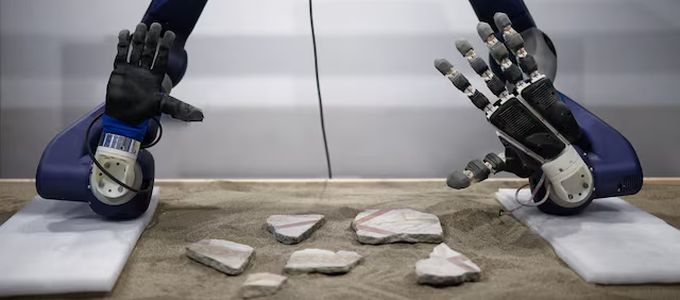
A rendszer két robotkarral dolgozik, amelyekhez különböző méretű, rugalmas fogószerkezetek és látószenzorok tartoznak. Ezek lehetővé teszik, hogy a robot felismerje, kézbe vegye és nagy pontossággal illessze össze a töredékeket anélkül, hogy megsértené a rendkívül érzékeny felületeket. Az MI-alapú képfelismerő és mintázatfelismerő algoritmusok olyan árnyalatokat, kontúrokat és kapcsolódási pontokat is képesek felfedezni, amelyek az emberi szem számára alig vagy egyáltalán nem láthatók. A kutatók szerint a feladat olyan, mintha egy hatalmas kirakót kellene megoldani úgy, hogy egyes darabok hiányoznak, ráadásul nincs meg a doboz képe sem. Ahogy a projektet vezető professzor, Marcello Pelillo fogalmazott: olyan ez, mintha négy-öt különböző kirakót összekevernénk, eldobnánk a dobozokat, majd megpróbálnánk mindet egyszerre kirakni.
A tesztelési fázisban a szakemberek nem az eredeti, pótolhatatlan freskódarabokon dolgoztak, hanem hű másolatokon, hogy kizárják a sérülés kockázatát. A robot az úgynevezett Gladiátorok Házából előkerült, 2010-ben összedőlt freskókat, valamint két nagyméretű mennyezetfreskót rekonstruált. Olyan műveket, amelyek már a Kr. u. 79-es Vezúv-kitörés következtében megrongálódtak, majd a háborús bombázások tovább roncsolták őket.
A kutatók hisznek abban, hogy a technológia nem csupán Pompeji számára hozhat áttörést. Ha beválik, a robotrendszer a világ bármely régészeti vagy restaurátori műhelyében alkalmazható lesz, különösen ott, ahol hatalmas mennyiségű, töredékes lelet vár feldolgozásra. A cél az, hogy a régészeti rekonstrukciók többé ne hosszú, kézi aprómunkán múljanak, hanem olyan, precíz és gyors támogatáson, amely lehetővé teszi, hogy a múlt darabjai jóval hamarabb és pontosabban álljanak össze, mint valaha.
A RePAIR nevű, EU-finanszírozott projekt célja, hogy felgyorsítsa és pontosabbá tegye azt a rendkívül lassú és gyakran frusztráló folyamatot, amely során a régészek és restaurátorok a széttört műtárgyak apró darabjait próbálják újra összeilleszteni. A kutatás 2021-ben indult a velencei Ca’ Foscari Egyetem koordinálásával, és most Pompejiben mutatták be, ahol a nemzetközi kutatócsoportok az ősi romvárost használták kísérleti terepként. A projekt megszületését egy nagyon is gyakorlati igény indította el: számos, a második világháborús bombázások során szétszakadt freskó máig szétszórt darabjai várták, hogy újra összeállhassanak. Pompeji igazgatója, Gabriel Zuchtriegel szerint az ilyen töredékek kézi összeillesztése hagyományosan évekig, akár évtizedekig is eltarthat, ezért a robotikus megoldás jelentős előrelépést kínál.
A rendszer két robotkarral dolgozik, amelyekhez különböző méretű, rugalmas fogószerkezetek és látószenzorok tartoznak. Ezek lehetővé teszik, hogy a robot felismerje, kézbe vegye és nagy pontossággal illessze össze a töredékeket anélkül, hogy megsértené a rendkívül érzékeny felületeket. Az MI-alapú képfelismerő és mintázatfelismerő algoritmusok olyan árnyalatokat, kontúrokat és kapcsolódási pontokat is képesek felfedezni, amelyek az emberi szem számára alig vagy egyáltalán nem láthatók. A kutatók szerint a feladat olyan, mintha egy hatalmas kirakót kellene megoldani úgy, hogy egyes darabok hiányoznak, ráadásul nincs meg a doboz képe sem. Ahogy a projektet vezető professzor, Marcello Pelillo fogalmazott: olyan ez, mintha négy-öt különböző kirakót összekevernénk, eldobnánk a dobozokat, majd megpróbálnánk mindet egyszerre kirakni.
A tesztelési fázisban a szakemberek nem az eredeti, pótolhatatlan freskódarabokon dolgoztak, hanem hű másolatokon, hogy kizárják a sérülés kockázatát. A robot az úgynevezett Gladiátorok Házából előkerült, 2010-ben összedőlt freskókat, valamint két nagyméretű mennyezetfreskót rekonstruált. Olyan műveket, amelyek már a Kr. u. 79-es Vezúv-kitörés következtében megrongálódtak, majd a háborús bombázások tovább roncsolták őket.
A kutatók hisznek abban, hogy a technológia nem csupán Pompeji számára hozhat áttörést. Ha beválik, a robotrendszer a világ bármely régészeti vagy restaurátori műhelyében alkalmazható lesz, különösen ott, ahol hatalmas mennyiségű, töredékes lelet vár feldolgozásra. A cél az, hogy a régészeti rekonstrukciók többé ne hosszú, kézi aprómunkán múljanak, hanem olyan, precíz és gyors támogatáson, amely lehetővé teszi, hogy a múlt darabjai jóval hamarabb és pontosabban álljanak össze, mint valaha.