Hunter
Bemutatkozik a Berkeley exoskeletonja
Egy 30 kilós csomag több kilométernyi egyenetlen terepen vagy akár 50 lépcsősoron felfelé való cipelésének már a puszta gondolata elegendő, hogy a legtermetesebb egyének is elhúzzák a szájukat. Azonban a Berkeley Egyetem áttörése a robotkutatásban hamarosan elhozhatja a várva várt megkönnyebbülést, egy önműködő külső váz, azaz exoskeleton képében, ami hatékonyan tünteti el a terhet az emberek válláról.
 "Eltökéltük hogy megalkotunk egy exoskeletont, ami az emberi irányító rendszert a robot izmokkal egyesíti" - mondta Homayoon Kazenoori, a Berkeley Robot és Emberi Technikák Laboratóriumának igazgatója, az egyetem gépészeti professzora. "A rendszert ergonómikusnak, rendkívül manőverezhetőnek és technikailag stabilnak terveztük, hogy a viselője képes legyen járni, leguggolni, hajolni és hintázni vele anélkül, hogy észrevehetően csökkenne az ügyessége, képes legyen átlépni az akadályokon, vagy átbújni alattuk miközben különböző tárgyakat szállít."
"Eltökéltük hogy megalkotunk egy exoskeletont, ami az emberi irányító rendszert a robot izmokkal egyesíti" - mondta Homayoon Kazenoori, a Berkeley Robot és Emberi Technikák Laboratóriumának igazgatója, az egyetem gépészeti professzora. "A rendszert ergonómikusnak, rendkívül manőverezhetőnek és technikailag stabilnak terveztük, hogy a viselője képes legyen járni, leguggolni, hajolni és hintázni vele anélkül, hogy észrevehetően csökkenne az ügyessége, képes legyen átlépni az akadályokon, vagy átbújni alattuk miközben különböző tárgyakat szállít."
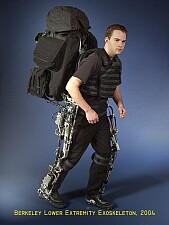
A hivatalosan Berkeley Lower Extremity Exoskeleton (BLEEX) néven futó eszköz legfontosabb alkotóelemei a mechanikus fém lábtámaszok, melyek mereven csatlakoznak a felhasználó lábaihoz. A váz más részei a dörzsölődés megelőzése érdekében jóval lazábban idomulnak az emberi testhez. A szerkezet tartalmaz egy energiaegységet és egy hátizsákszerű vázat, utóbbi a nagytömegű terhek szállítására szolgál.
Egy ilyen gép felbecsülhetetlen értékű lehet bárki számára, akinek nagy teherrel nagy távolságokat kell gyalog megtennie. Az exoskeletont használhatják a hadsereg szanitécei a sérült katonák harctéri szállítására, a tűzoltók felszereléseik feljuttatására a magas épületek több tucatnyi lépcsősorain, vagy a mentő alakulatok tagjai, akik ellátmányt szállítanak olyan helyszínekre, ahová a gépjárművek képtelenek bejutni.


Klikk a képekre a nagyításhoz
"Az általunk fejlesztett technika alapjaiból kifejleszthetők olyan eszközök, melyek a korlátolt izomzatú emberek járását optimálissá tehetik" - tette hozzá Kazerooni. A kutatók hangsúlyozzák, hogy az eszköz "vezetéséhez" a felhasználónak nincs szüksége botkormányra vagy különleges billentyűzetre. Ehelyett a gépet úgy alkották meg, hogy az ember az exoskeleton részévé váljon, éppen ezért nincs is szükség különleges felkészítésre használatához. A Berkeley kísérletei során a 45 kilogramm súlyú exoskeletont és 30 kilós hátizsákot viselő ember olyan könnyedén mozgott, mintha csak 2 kilogrammot hordozna.
 A Fejlett Védelmi Kutatási Projektek Hivatala, a DARPA által támogatott tervezet 2000-ben kezdett ígéretessé válni. A jelenlegi modell esetében a felhasználó belép egy pár átalakított katonai bakancsba, melyeket ezután az exoskeletonhoz csatolnak. Ezt övezi kívülről a fentebb említett fém lábtámasz, hogy elősegítse a könnyed mozgást. Ezután kerül fel az exoskeleton mellénye a viselőjére, ami a hátizsákszerű vázhoz és a hajtóműhöz csatlakozik. Ha a szerkezet kifogy az üzemanyagból az exoskeleton lábai könnyedén eltávolíthatók és a szerkezet átalakítható egy hatalmas hátizsákká.
A Fejlett Védelmi Kutatási Projektek Hivatala, a DARPA által támogatott tervezet 2000-ben kezdett ígéretessé válni. A jelenlegi modell esetében a felhasználó belép egy pár átalakított katonai bakancsba, melyeket ezután az exoskeletonhoz csatolnak. Ezt övezi kívülről a fentebb említett fém lábtámasz, hogy elősegítse a könnyed mozgást. Ezután kerül fel az exoskeleton mellénye a viselőjére, ami a hátizsákszerű vázhoz és a hajtóműhöz csatlakozik. Ha a szerkezet kifogy az üzemanyagból az exoskeleton lábai könnyedén eltávolíthatók és a szerkezet átalakítható egy hatalmas hátizsákká.
A több mint 40 érzékelő és hidraulikus működtető szerkezet egy lokális helyi hálózatot hoz létre az exoskeleton számára, ami az emberi idegrendszerhez hasonlóan működik. Az érzékelők, melyekből egyesek a cipőpárnákba vannak beágyazva, folyamatosan ellátják a központi számítógépet információkkal, ami így az ember mozdulatainak függvényében terheli át a súlyt. Amikor bekapcsolják az exoskeletont, az folyamatos számításokat végez, hogy mit tegyen ahhoz, hogy a terhelésből a lehető legkevesebb jusson viselőjére.
Számos mérnök dolgozik világszerte a motoros exoskeletonokon, azonban a legéletképesebb a Berkeley csapatának fejlesztése tűnik, akik most egy erősebb meghajtáson dolgoznak, ami akár 55-60 kilogrammot is képes szállítani, valamint tanulmányozzák a futás és az ugrás lehetőségeit is az exoskeleton lábaival. Az exoskeleton tervezése az emberi járás elemzésére épült. A kutatók rengeteg információt gyűjtöttek össze mozgásunkról, beleértve a mozgatóerőt, a bokák mozgatásához szükséges forgatónyomatékot és a térdek rezgéselnyelő erejét, így az exoskeletont hozzá tudták igazítani az emberi mozgás sokszínűségéhez.
"Már az ötvenes évektől kezdve számtalan tudós és mérnök próbálkozott egy gépi erőfokozó eszköz megépítésével, azonban egyikük sem járt sikerrel" - mondta Kazerooni. "Számunkra is csupán a technika legújabb vívmányai kezdik valóra váltani ezt az álmot." Az exoskeleton a DARPA március 9. és 11. között megrendezendő technikai szimpóziumán mutatkozik be.
Letölthető videók:
Video 1 (MPG, 28 MB)
Video 2 (MPG, 21 MB)
Video 3 (MPG, 18 MB)
"Eltökéltük hogy megalkotunk egy exoskeletont, ami az emberi irányító rendszert a robot izmokkal egyesíti" - mondta Homayoon Kazenoori, a Berkeley Robot és Emberi Technikák Laboratóriumának igazgatója, az egyetem gépészeti professzora. "A rendszert ergonómikusnak, rendkívül manőverezhetőnek és technikailag stabilnak terveztük, hogy a viselője képes legyen járni, leguggolni, hajolni és hintázni vele anélkül, hogy észrevehetően csökkenne az ügyessége, képes legyen átlépni az akadályokon, vagy átbújni alattuk miközben különböző tárgyakat szállít." A hivatalosan Berkeley Lower Extremity Exoskeleton (BLEEX) néven futó eszköz legfontosabb alkotóelemei a mechanikus fém lábtámaszok, melyek mereven csatlakoznak a felhasználó lábaihoz. A váz más részei a dörzsölődés megelőzése érdekében jóval lazábban idomulnak az emberi testhez. A szerkezet tartalmaz egy energiaegységet és egy hátizsákszerű vázat, utóbbi a nagytömegű terhek szállítására szolgál.
Egy ilyen gép felbecsülhetetlen értékű lehet bárki számára, akinek nagy teherrel nagy távolságokat kell gyalog megtennie. Az exoskeletont használhatják a hadsereg szanitécei a sérült katonák harctéri szállítására, a tűzoltók felszereléseik feljuttatására a magas épületek több tucatnyi lépcsősorain, vagy a mentő alakulatok tagjai, akik ellátmányt szállítanak olyan helyszínekre, ahová a gépjárművek képtelenek bejutni.



Klikk a képekre a nagyításhoz
"Az általunk fejlesztett technika alapjaiból kifejleszthetők olyan eszközök, melyek a korlátolt izomzatú emberek járását optimálissá tehetik" - tette hozzá Kazerooni. A kutatók hangsúlyozzák, hogy az eszköz "vezetéséhez" a felhasználónak nincs szüksége botkormányra vagy különleges billentyűzetre. Ehelyett a gépet úgy alkották meg, hogy az ember az exoskeleton részévé váljon, éppen ezért nincs is szükség különleges felkészítésre használatához. A Berkeley kísérletei során a 45 kilogramm súlyú exoskeletont és 30 kilós hátizsákot viselő ember olyan könnyedén mozgott, mintha csak 2 kilogrammot hordozna.
A Fejlett Védelmi Kutatási Projektek Hivatala, a DARPA által támogatott tervezet 2000-ben kezdett ígéretessé válni. A jelenlegi modell esetében a felhasználó belép egy pár átalakított katonai bakancsba, melyeket ezután az exoskeletonhoz csatolnak. Ezt övezi kívülről a fentebb említett fém lábtámasz, hogy elősegítse a könnyed mozgást. Ezután kerül fel az exoskeleton mellénye a viselőjére, ami a hátizsákszerű vázhoz és a hajtóműhöz csatlakozik. Ha a szerkezet kifogy az üzemanyagból az exoskeleton lábai könnyedén eltávolíthatók és a szerkezet átalakítható egy hatalmas hátizsákká. A több mint 40 érzékelő és hidraulikus működtető szerkezet egy lokális helyi hálózatot hoz létre az exoskeleton számára, ami az emberi idegrendszerhez hasonlóan működik. Az érzékelők, melyekből egyesek a cipőpárnákba vannak beágyazva, folyamatosan ellátják a központi számítógépet információkkal, ami így az ember mozdulatainak függvényében terheli át a súlyt. Amikor bekapcsolják az exoskeletont, az folyamatos számításokat végez, hogy mit tegyen ahhoz, hogy a terhelésből a lehető legkevesebb jusson viselőjére.
Számos mérnök dolgozik világszerte a motoros exoskeletonokon, azonban a legéletképesebb a Berkeley csapatának fejlesztése tűnik, akik most egy erősebb meghajtáson dolgoznak, ami akár 55-60 kilogrammot is képes szállítani, valamint tanulmányozzák a futás és az ugrás lehetőségeit is az exoskeleton lábaival. Az exoskeleton tervezése az emberi járás elemzésére épült. A kutatók rengeteg információt gyűjtöttek össze mozgásunkról, beleértve a mozgatóerőt, a bokák mozgatásához szükséges forgatónyomatékot és a térdek rezgéselnyelő erejét, így az exoskeletont hozzá tudták igazítani az emberi mozgás sokszínűségéhez.
"Már az ötvenes évektől kezdve számtalan tudós és mérnök próbálkozott egy gépi erőfokozó eszköz megépítésével, azonban egyikük sem járt sikerrel" - mondta Kazerooni. "Számunkra is csupán a technika legújabb vívmányai kezdik valóra váltani ezt az álmot." Az exoskeleton a DARPA március 9. és 11. között megrendezendő technikai szimpóziumán mutatkozik be.
Letölthető videók: