Alex
Technika a marsjáró mögött

A marsjáró gyakorlatilag egy mobil geológiai laboratórium. Elődjével szemben igazi gigász; a Mars Pathfinder küldetésnél használt Sojourner robot mindössze 65 centi hosszú és 10 kg volt. A Röver ezzel szemben másfél méter magas, 230 centi hosszú és 160 centi széles, tömege 174 kg.
Testének anyaga méhsejtszerű kompozit, melyet arannyal és a Stardust missziónál üstökösporelfogásra használt aerogéllel szigeteltek. Hátán háromszög alakú felszerelésdoboz van, három antennával, a fő kameraállvánnyal és a kihajtható napelemekkel. A napelemek nagysága 1,3 négyzetméter, melyek 140 watt teljesítményt termelnek a műszerek számára melyet a Rover a mobiltelefonoknál is alkalmazott lítium-ion akkumulátoraiban tárol. Sajnos a napcellák teljesítménye a 90 naposra tervezett küldetés végére a por és az évszakváltozás miatt közel felére, vagy az alá fog csökkeni.

A Rover küldetés vezetője Pete Theisinger (balra) Dick Cheney alelnök társaságában a marsjáró életnagyságú modellje mellett
Az akkumulátorok és más, a marsi hidegre érzékeny eszközök a testen belül helyezkednek el. Az éjszakai hőmérséklet a vörös bolygón -105 fokra is csökkenhet, de az akkumulátorok -20 fok alatt nem tudnak áramot szolgáltatni, és 0 fok alatt nem tölthetők újra. A melegítés elektromos fűtőtesttel, nyolc rádióizotópos melegítővel és az elektronikus eszközök saját hőjével történik. A rádióizotópok mindegyike 2,7 gramm, gondosan grafitba csomagolt plutónium-dioxidot tartalmaz, melyek mérete kb. akkora mint a ceruzák végén lévő radírdarab, és egy watt hőt tudnak generálni. A technológiát a rakétaindításnál és az érkezésnél fellépő erőhatások figyelembevételével már többször tesztelték, és már a Mars Pathfinder küldetésnél is alkalmazták melegítésre.
A marsjáró "agya" a testében van, és egy VME (Versa Module Europa) buszon keresztül tartja a kapcsolatot a motorokkal, a tudományos műszerekkel és a kommunikációs egységekkel. A számítógép maga egy 32 bites, 20 MHz-es Rad 6000 mikroprocesszor. Ez a Machintosh számítógépekben is használt PowerPC chip módosított változata, melyet felkészítettek a magas sugárzásra. A számítógép speciális memóriájának is ki kell bírnia a Nap erejét, kapacitása egy mai átlagos irodai számítógéppel egyezik meg: 128 MB hibatűrő DRAM, 256 MB flash és 3 MB EEPROM van benne a nem törlödő adatok számára. Ugyan kevésnek tűnhet, de ez a '97-es Pathfinder küldetésnél körülnéző Sojourner Rover ezerszerese, másrészt mint később kiderül, messze nem ez az adatgyűjtést befolyásoló "szűk keresztmetszet".

A Rover felülnézetben
A számítógép öndiagnosztikája folyamatos, állandóan figyeli a hőmérsékletet, az áramtermelést, az akkumulátorok tárolta energiát, felkészül és ütemezi a kommunikációs időszakokat. A bonyolultabb tevékenységek, mint a fényképezés, a mozgás vagy a tudományos műszerek használata közvetlenül a földi csapat irányítása alatt vannak.
Mint a NASA minden bolygóközi küldetése esetén, a kommunikáció a Rover missziónál is a "Deep Space Network"-ön (Mélyűri Hálózat) keresztül zajlik. A marsjáró közvetlenül a Földdel, vagy a Mars körül keringő műholdakat átjátszó állomásnak használva is képes kommunikálni. A legnagyobb problémát a távolság okozza: még a fénynek is 8 percbe tellik odaérni, ráadásul ez - az átvihető adatok mennyiségét erősen csökkentve - 2004 januárja és áprilisa között 65 százalékkal növekedni is fog.
A Deep Space Network 2003 december 24-én volt 40 éves, és három, a Föld átellenes pontjain elhelyezkedő rádióantenna-rendszerből áll, így valamelyik helyről a Föld bármely helyzetében rálátni a kívánt pozícióra. Ezek a kaliforniai Mojave sivatagban, Madrid mellett és az ausztráliai Canberrában vannak. Mindegyik egy 70 méteres nagy antennával, két 34 méteres kisebb antennával illetve egyéb műszerekkel van ellátva, és folyamatosan kapcsolatban állnak a NASA pasadenai Sugárhajtómű Laboratóriumával. Érdemes megjegyezni, hogy Kármán Tódor itt hajtotta végre az első sugárhajtómű-kísérleteket, ezért a marsjáró sajtótájékoztatóinak helyet adó nagyterem az ő nevét viseli. A direktben a marsjáróról a Földre sugározható adatok sebessége 3500 és 12 000 bit/másodperc között van, ez egy átlagos telefonos modem sávszélességének tizede/egyharmada. A Mars körüli pályán keringő műhold felé ennél jóval nagyobb, konstans 128 000 bit/s sebességre is képes (duál ISDN sebesség), ezt azonban csak rövid ideig teheti meg, mivel naponta mindössze nyolc percig megfelelő az objektum helyzete. Ez alatt az idő alatt mintegy 6 megabájtnyi adatot tud továbbítani, ami máskülönben több órába is beletelne. Az energiamegtakarítás és az extrém hőmérsékleti viszonyok miatt a közvetlen földi kapcsolat egy viszonylag szűk idősávban, naponta három órán át állhat fenn, habár a rálátási időtartam jóval nagyobb.
A Spiriten egy a Columbia űrhajósaira emlékeztető plakettet is elhelyeztek
A Marssal együtt a Rover is forog. Egy marsi nap pontosan 24 óra 39 perc és 35 másodperc, egy marsi év 687 földi nap. A Mars körüli pályáról a Föld naponta 16 órán át látható, de a műhold nemcsak ezért tud több adatot küldeni, hanem mivel a - marsjárónál nagyobb - napelemeit tovább süti a nap, antennája is hosszabb ideig üzemelhet.
A marsjáró hátán összesen négy antenna van: kis, közép és nagyfrekvenciás plusz egy UHF a rövidtávú kommunikációra. A kisfrekvenciás bármely irányba képes jeleket adni és venni, míg a nagy csak egy szűk sugárban, de jóval nagyobb átviteli sebességgel tud kommunikálni. A Mars körül jelenleg két amerikai műhold, a Mars Odyssey és a Mars Global Surveyor kering. Amikor a Rover átjászóállomásnak használja ezeket, velük UHF antennával kommunikál. A középhullámú antenna csak a bolygó megközelítése közben volt fontos, a felszínen nincs használatban.

A sztereó kamerák képe igazán csak speciális szemüveggel élvezhető
Az átlagemberek számára leglátványosabb eredményeket a Rover panorámakamerája biztosítja. Ez valójában két nagyfelbontású sztereókamerából áll, és a képek nemcsak szépek, hanem a tudósok is ezekből a felvételekből tudják megállapítani, hogy melyik szikla vagy kődarab vizsgálata jelenthet előrelépést a fő cél, a hajdanvolt víz létének bizonyításában. A két lencse a talajtól másfél méterre és egymástól 30 centire van, és 14 különböző szűrő segíti az elemzések elkészítését. A szemek felbontása első hallásra megdöbbentően kicsi, mindössze 1028x1028 pixel, azaz egy megapixel. Ez egy mai olcsó digitális fényképezőgép tudásának felel meg, de persze hiba lenne ebből következtetéseket levonni.
A CCD technológiát 1969-ben fejlesztették ki, de hosszú idő telt el, mire használhatóan kicsire sikerült zsugorítani. A mai digitális fényképezőgép-gyártáshoz szükséges tudás alapjait a NASA fektette le. Az első nagy mérföldkő a 800x800 pixel elérése volt - ekkorát építettek be a Hubble teleszkópba.
A fényképezőgép kalibrálására egy különleges eszköz, a "Sundial" szolgál, mely a Rover testén van. Ennek sarkaiban színes négyzetek, a középső bot körül pedig árnyékos területek vannak. A küldetés során többször is lefotózva, az erről készült felvételekhez hasonlítva tudják a földi szakemberek viszonyítani a képek fényességét.
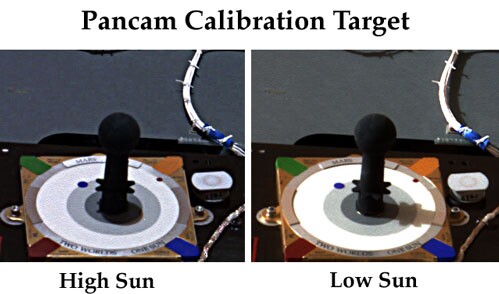
A SunDial; a bal oldali képen dél van, a jobb oldalin délután. A szélén lévő színek segítik a panorámakamera pontos beállítását
A ma digitális fényképezőgépet vásárló emberek többsége a megapixeleket nézi, de a NASA technológiája is mutatja, hogy igazán az optika számít. A marsjáróban lévő fényképezőgép nagyjából a forgalomban is kapható Casio vagy Pentax készülékekben lévő technikához hasonlítható, persze a tömegtermelésben gyártott termékeknél jóval finomabb minőségű. A legfőbb különbség a fényérzékelő lapka, a CCD nagysága. A félprofi kategóriába sorolható Sony DSC-F717-nél 5,2 millió érzékelőszem (azaz 5 megapixel) van egy 8,8x6,6 milliméteres lapkán. A Pancam CCD-je ezzel szemben egymilliót tartalmaz 12x12 milliméteren, tehát mindegyik közel négyszer akkora, mint a Sony érzékelője.
A fogyasztói piacon az 5 megapixeles fényképezőgépek fényérzékeny chipje gyakran ugyanakkora mint a 3 MP-es változatoké - egyszerűen több pixelt zsúfolnak össze azonos méretű helyre. Mivel a kisebb pixel kevésbé fényérzékeny, ez meglátszik a minőségen is. A fény pontos fókuszálásához jobb minőségű lencse kell, és ha ez nem teljesül, hiába a sok érzékelő mivel az egymás melletti pontokba jutó információ megegyezik, ugyanazt érzékelik, mintha kisebb felbontású lenne a CCD.
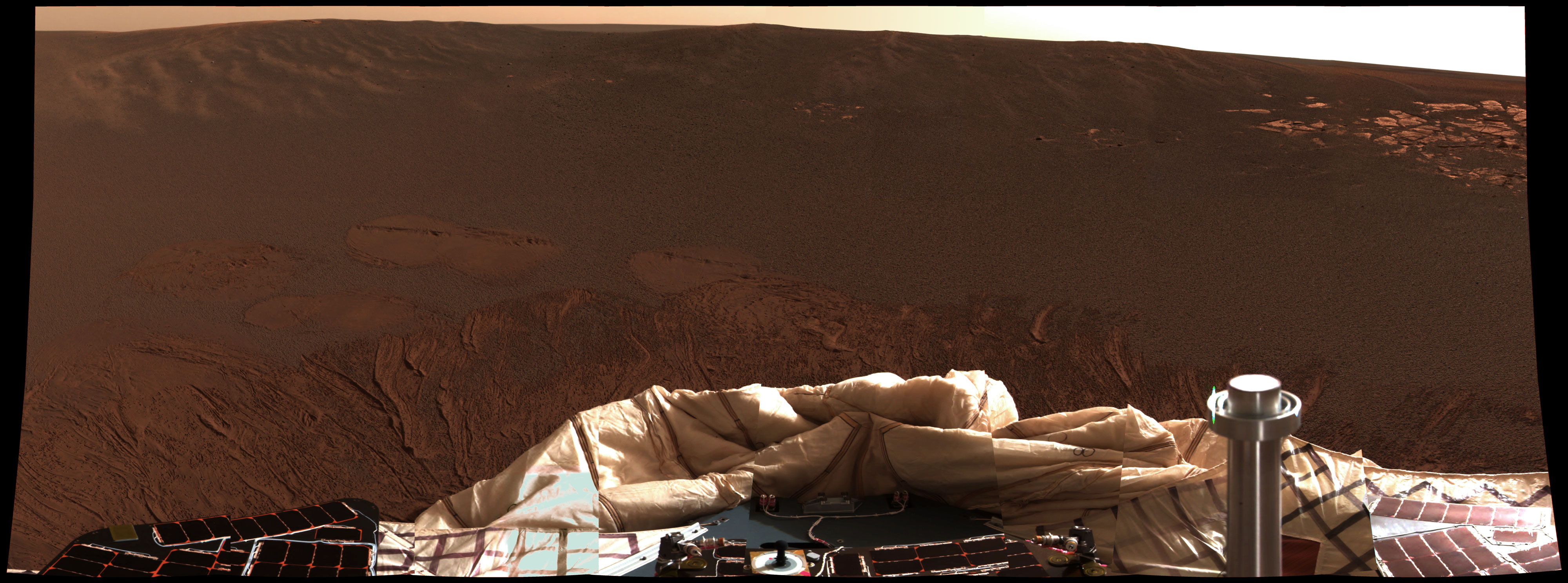
A Spirit panorámakamerájával készített felvétel - egérrel elhúzható!
Forrás: CsaTolna Egyesület
A NASA mérnökeinek közlése szerint a kamerák által biztosított kép messze meghaladja az emberi szem képességeit, amit nagyításnál lehet igazán észrevenni. A boltokban kapható digitális fényképezőgépek egyetlen szűrőt használnak. Ezzel szemben a Pancam esetében - mivel mint a Hubble űrteleszkópnál a gép itt sem érzékel közvetlenül színeket, csak a fény árnyalatait - szűrőket használnak. A legegyszerűbb esetben három felvételt készítenek a vizsgált helyszínről, egyet-egyet piros, zöld és kék szűrővel, majd ezekből egy speciális szoftverrel színes felvételt készítenek. Ezt javítja még tovább a panorámakép készítésének lehetősége, több kép összekapcsolása. A lapunkon is látható panorámaképeknél függőlegesen 4, vízszintesen 24 felvételt raktak össze, melyek együttesen akár egy mozivásznon is kielégítő minőséget adnának. A Rover aljának elején és végén veszélyfigyelő kamerák vannak, szintén párban, hogy fekete-fehér felvételeikből háromdimenziós képeket lehessen készíteni. Lencséik nagylátószögűek, halszemoptikájuk 120 fokot fog át. A fedélzeti navigációs szoftver általuk érzékeli az akadályokat, és vizsgálatok esetén ezek segítségével történik a marsjáró műszerekkel megrakott robotkarjának pozicionálása is.
A navigációs kamera a panorámakamerához hasonlóan legfelül van, képes forogni és bólintani. Annak 16 fokos látószögével szemben viszont 45 fokos szögben lát, de nincsenek rajta szűrők a színes felvételekhez. Mint neve is mutatja, elsősorban a tájékozódáshoz van rá szükség, új pozició elérésekor gyorsan készíthető vele a környező tájról kis sávszélességigénnyel is a Földre továbbítható panorámakép. A földi mérnökcsapat ezek elemzése után tudja eldönteni merre küldje a robotot - habár most, a küldetés elején inkább nem mozgatják sehova.
A Mars a panorámakamera lencséjén át - klikk a képre a nagyításhoz
A hatkerekű Rover akár 45 fokos lejtőt is képes leküzdeni bármely irányban (habár a számítógép 30 foknál nagyobb dőlés esetén leszabályoz), és kerekeinél nagyobb, 26 centis sziklákon is átmegy. Az első és a hátsó kerekek független motorja miatt helyben is meg tud fordulni, nehéz terepen maximális sebessége 5 centiméter másodpercenként.
Elméletben a Rover naponta 100 métert is megtehet, de mozgásra csak naponta négy órája van, mivel a Nap csak ennyi ideig biztosít elegendő energiát. A sziklától szikláig mozgás a földi irányítóktól nagy távolságra az időtényező miatt csak önállóan kivitelezhető, mivel egy olyan autó, ahol a "sofőr" nem látja folyamatosan mi van előtte bármikor egy távolról nem látható résbe zuhanhat. A Rover ezért részben egyedül mozog, de kockázatelemző szoftvere átlagosan tízmásodpercenként megállítja, és csak 40-50 másodperces vizsgálódást követően mozoghat újra. Egy ilyen szakasz alatt körübelül 30 centi megtételére képes. Az elején és a farnál lévő veszélyelemző kamerák képét 3 méter távolságban, 4 méter szélességben elemzi - utóbbi érték azért ilyen nagy, mivel a fényképezőgép a testre van rögzítve, tehát a kamera nem fordulhat el.
A Földről mondják meg, pontosan hova menjen, mely adat tartalmazza a távolságot és az irányt, majd hogy utána hol vizsgálodjon robotkarjára szerelt műszereivel, de a módot magát a robot választja ki. Ezenkívűl idő és megtehető távolsághatárt is adnak, hogy valamilyen hibás döntés, például egy nagy akadály megkerülése miatt véletlenül se veszhessen el a jármű.
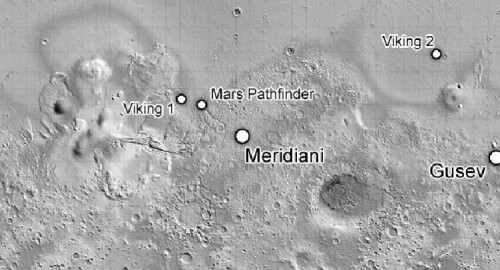
Az eddig Marsot ért expediciók a bolygó kiterített térképén jelölve
Egy speciális mérőműszer figyeli a helyzetét (IMU, Inertial Measurement Unit), a vízszintes, függőleges és oldalmozgást. Ennek segítségével tud térben tájékozódni, kiválasztani a megfelelő irányt és minimalizálni a Mars felszínének egyenetlenségeit. A veszélyelemző kamerák képe a számítógépben x,y,z koordinátákká alakul, a létrejövő háromdimenziós képben a felszín egyenetlenségei is le vannak képezve. A Pathfinder küldetésnél 20 mérés történt minden lépésnél, a MER ezzel szemben 6-10 ezer mérést végez. Akadályként a 30 centinél nagyobb tárgyakat jelöli meg, és a lehetséges rövid utak közül a legbiztonságosabbat választja ki. Ahogy megtett egy szakaszt, képét eltárolja, így kis idő múlva egy 10x10 méteres "világ" alakul ki számára, ahol csúszós terep, vagy akadály esetén jóval könyebben manőverezhet. Ez az információ 5 méterenként törlödik, tehát ahogy megtette saját nagyságának hatszorosát, elfelejti, hol volt.
A terep adatainak egy részét tárolja, kis részét pedig elsugározza a Földre, ahol szintén térképet gyártanak belőle. A korlátozott sávszélesség miatt a mérnököknek dönteniük kell, a tudományos értékkel bíró, vagy a Rover működését befolyásoló adatokat kérik le.
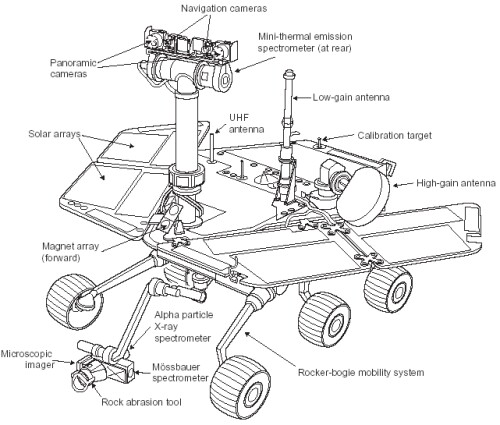
A marsjáró technikai rajza
A Rover fejreállását giroszkópjai és gyorsulásmérői akadályozzák meg. Végzetes hiba esetén a földről a Pancam is segítségül hivható, mely egyébként nem része a manőverező rendszernek. A Pancam automatikusan meg tudja keresni az égen a Napot, majd 10 percig figyeli, amíg az 2,5 fokot elmozdul. Ennek alapján kiszámolható, a Rover milyen irányban áll.
Jelenleg a Spirit memóriaproblémákkal küzd, az Opportunity pedig alig pár napja szállt le és most készíti első képeit. Mivel már eddig is csodálatos új világot mutattak be, a nagyközönség figyelmét is fenntartó korszakalkotó felvételek már nem várhatók tőlük, annál inkább szolgálhatnak fontos adatokkal a kutatóknak az eljövendő Mars expediciók számára.