SG.hu·
Ultrakönnyű mikrorepülőgép Svájcból
Ultrakönnyű, automatikus vezérléssel rendelkező repülőgépet készített egy svájci kutatócsoport. A szerkezet különlegessége a méretében és a beltéri repülési képességében rejlik.
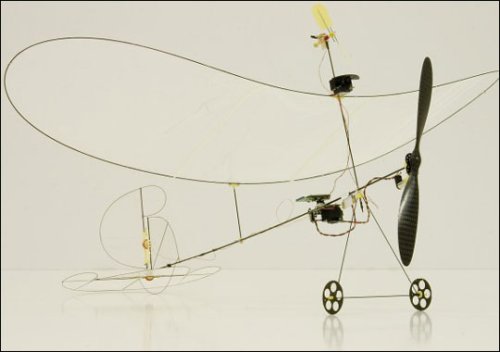
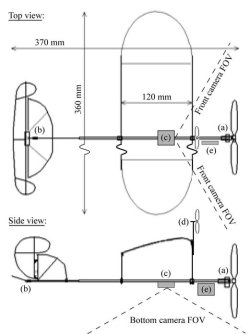
A Svájci Szövetségi Műszaki Intézet munkatársai által kifejlesztett 10 grammos mikrorepülőgép szárnyfesztávolsága 36 centiméter, méretei azonban akár egy rovar méretére is lecsökkenthetők, nyilatkozott a projekt vezetője, Jean-Christophe Zufferey. Hozzátette, hogy mint sokan mások, ők is a rovaroktól - konkrétan a legyektől - merítettek ihletet, azonban másnak még nem igen sikerült megvalósítania egy beltéri repülő rendszert.
Az automatizált beltéri repülés nem kevés műszaki kihívást támaszt a vállalkozó szellemű mérnökök elé. A repülőnek rengeteg akadályt kell kerülgetnie, falakat, sarkokat, polcokat, bútorokat. Ehhez látnia kell az akadályokat, és elegendő agyteljesítménnyel kell rendelkeznie a gyors manőverezéshez. Egy átlagos robot esetében ez jelentős processzorteljesítményt, nagy felbontású kamerákat, illetve valamilyen távolságérzékelőt feltételez.
Ezek az alkatrészek azonban igen súlyossá tennék a gépet, és minél nehezebb egy repülő, annál gyorsabban kell szárnyalnia, hogy a levegőben tudjon maradni, ez pedig beltérben elég kockázatossá teszi a repülést. A beltéri repüléshez a jó manőverezés érdekében kis méret és kis repülési sebesség szükséges, fontos az alacsony súly, hogy minél könnyebben maradjon a levegőben, a kis fogyasztású elektronikák és nem utolsósorban a gyors és precíz szenzorok, valamint irányítórendszer alkalmazása.
 Egy légy jókora összetett szemeivel navigál, melyekkel szinte a teljes teret érzékelik. Optikai lebenyeik mozgásérzékeny neuronokat tartalmaznak, melyek a retinán áthaladó mozgóképekre reagálnak. Ezeket a mozgóképeket nevezik optikai folyamnak, ami egyesíti a rovar egyenes irányú repülésből származó adatait az egyéb mozgásokból, mint például fordulásból, fel-le és oldalirányú mozgásokból származókkal.
Egy légy jókora összetett szemeivel navigál, melyekkel szinte a teljes teret érzékelik. Optikai lebenyeik mozgásérzékeny neuronokat tartalmaznak, melyek a retinán áthaladó mozgóképekre reagálnak. Ezeket a mozgóképeket nevezik optikai folyamnak, ami egyesíti a rovar egyenes irányú repülésből származó adatait az egyéb mozgásokból, mint például fordulásból, fel-le és oldalirányú mozgásokból származókkal.
Az egyenes mozgásból származó adatok - például egy objektum egyre nagyobb lesz a látómezőben - információt közölnek a tárgy távolságáról. Valójában a legyek hajlamosak végig egyenes vonalban repülni, egészen addig, míg túl közel nem érnek az akadályhoz, ekkor egy gyors 90 fokos fordulással elkerülik az ütközést és folytatják az egyenes vonalú mozgást. A legyek rendelkeznek két szervvel is, ami segíti őket a repülés hirtelen irányváltások utáni stabilizálásában.
Zuffrey és munkatársai ezeket a paramétereket gyúrták bele robotjukba. A légy látását két parányi kisfelbontású, 120 fokos szögben látó kamerával utánozták, melyeket a szárny alatt és felett helyeztek el. A stabilitást egy mikrochip méretű giroszkóp látja el, a rovarszerű viselkedést pedig egy fedélzeti jelfeldolgozó és vezérlő szoftver biztosítja. A gép lelke egy 32 MHz-en üzemelő mikrokontroller és egy Bluetooth rádió modul, a teljes gépet pedig egy 90 mAh-s lítium-polimer akku táplálja, üzemideje megközelítőleg 15 perc.

A Holodeck
Legutóbbi kísérletükben a kutatók alkotásukat egy 7x7 méteres szobában, az úgynevezett holodeckben tesztelték, melyet 8 kivetítővel láttak el, különböző textúrákat vetítve a falakra. A mikrorepülő közel öt percen át tudott saját erejéből navigálni. A kutatók jelenleg a méretek csökkentésén dolgoznak, céljuk egy házi légy paramétereinek elérése, illetve a magasságváltoztatás képességével való felruházás.
A projekt célja olyan parányi repülőalkalmatosságok kifejlesztése, melyek képesek felderíteni a házak belsejét a látást használva fő információforrásként, segítséget nyújtva a különböző mentési munkálatokat végzők számára.
A Svájci Szövetségi Műszaki Intézet munkatársai által kifejlesztett 10 grammos mikrorepülőgép szárnyfesztávolsága 36 centiméter, méretei azonban akár egy rovar méretére is lecsökkenthetők, nyilatkozott a projekt vezetője, Jean-Christophe Zufferey. Hozzátette, hogy mint sokan mások, ők is a rovaroktól - konkrétan a legyektől - merítettek ihletet, azonban másnak még nem igen sikerült megvalósítania egy beltéri repülő rendszert.
Az automatizált beltéri repülés nem kevés műszaki kihívást támaszt a vállalkozó szellemű mérnökök elé. A repülőnek rengeteg akadályt kell kerülgetnie, falakat, sarkokat, polcokat, bútorokat. Ehhez látnia kell az akadályokat, és elegendő agyteljesítménnyel kell rendelkeznie a gyors manőverezéshez. Egy átlagos robot esetében ez jelentős processzorteljesítményt, nagy felbontású kamerákat, illetve valamilyen távolságérzékelőt feltételez.
Ezek az alkatrészek azonban igen súlyossá tennék a gépet, és minél nehezebb egy repülő, annál gyorsabban kell szárnyalnia, hogy a levegőben tudjon maradni, ez pedig beltérben elég kockázatossá teszi a repülést. A beltéri repüléshez a jó manőverezés érdekében kis méret és kis repülési sebesség szükséges, fontos az alacsony súly, hogy minél könnyebben maradjon a levegőben, a kis fogyasztású elektronikák és nem utolsósorban a gyors és precíz szenzorok, valamint irányítórendszer alkalmazása.
Egy légy jókora összetett szemeivel navigál, melyekkel szinte a teljes teret érzékelik. Optikai lebenyeik mozgásérzékeny neuronokat tartalmaznak, melyek a retinán áthaladó mozgóképekre reagálnak. Ezeket a mozgóképeket nevezik optikai folyamnak, ami egyesíti a rovar egyenes irányú repülésből származó adatait az egyéb mozgásokból, mint például fordulásból, fel-le és oldalirányú mozgásokból származókkal. Az egyenes mozgásból származó adatok - például egy objektum egyre nagyobb lesz a látómezőben - információt közölnek a tárgy távolságáról. Valójában a legyek hajlamosak végig egyenes vonalban repülni, egészen addig, míg túl közel nem érnek az akadályhoz, ekkor egy gyors 90 fokos fordulással elkerülik az ütközést és folytatják az egyenes vonalú mozgást. A legyek rendelkeznek két szervvel is, ami segíti őket a repülés hirtelen irányváltások utáni stabilizálásában.
Zuffrey és munkatársai ezeket a paramétereket gyúrták bele robotjukba. A légy látását két parányi kisfelbontású, 120 fokos szögben látó kamerával utánozták, melyeket a szárny alatt és felett helyeztek el. A stabilitást egy mikrochip méretű giroszkóp látja el, a rovarszerű viselkedést pedig egy fedélzeti jelfeldolgozó és vezérlő szoftver biztosítja. A gép lelke egy 32 MHz-en üzemelő mikrokontroller és egy Bluetooth rádió modul, a teljes gépet pedig egy 90 mAh-s lítium-polimer akku táplálja, üzemideje megközelítőleg 15 perc.
A Holodeck
Legutóbbi kísérletükben a kutatók alkotásukat egy 7x7 méteres szobában, az úgynevezett holodeckben tesztelték, melyet 8 kivetítővel láttak el, különböző textúrákat vetítve a falakra. A mikrorepülő közel öt percen át tudott saját erejéből navigálni. A kutatók jelenleg a méretek csökkentésén dolgoznak, céljuk egy házi légy paramétereinek elérése, illetve a magasságváltoztatás képességével való felruházás.
A projekt célja olyan parányi repülőalkalmatosságok kifejlesztése, melyek képesek felderíteni a házak belsejét a látást használva fő információforrásként, segítséget nyújtva a különböző mentési munkálatokat végzők számára.