SG.hu·
Állati ösztönök egy robot mozgásában
Egy nemrég továbbfejlesztett kétlábú robot "ösztönösen" alkalmazkodik az ismeretlen terephez, olyan folyamatokat aknázva ki, melyek az állatok mozgását jellemzik.
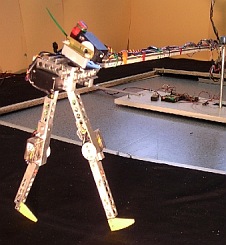
A mindössze 23 centi magas Runbot gyakorlatilag alig több egy pár fémlábnál, felette csupán néhány áramkör és motorok helyezkednek el. A német Göttingen Egyetem Florentin Wörgötter által vezetett laboratóriumának szülöttje a leggyorsabb kétlábú robot titulusát birtokolja, egy rúdhoz erősítve masírozik, időnként botladozva egy pont körül. A legtöbb kétlábú robottal ellentétben egy rendkívül dinamikus szerkezetről van szó, ami könnyedén lépést tartana egy sietősen gyalogló emberrel.
Legutóbbi változata egy "hierarchikus vezérlő szerkezetnek" köszönhetően már képes megbirkózni a terep váratlan egyenetlenségeivel is. A hierarchikus szerkezet azt jelenti, hogy a terep nehézségi fokának megfelelő vezérlési szinteket hívhat segítségül a "futó" robot. A legalsó szint csupán egy alapvető kontrollt ad a robot sétáló mozgásának. Ilyenkor a rendszer adatokat gyűjt a mechanikus ízületekből, melyeket feldolgozva és parancsok formájában visszaküldve finomra hangolja, stabillá teszi a robot mozgását egy viszonylag egyenletes terepen. Amint a felszín egyenetlenebbé válik ez az alap szint már nem elegendő a Runbot egyensúlyának megtartásához, ezért a kutatók egy magasabb vezérlő mechanizmust is beléptettek a rendszerbe. Ha a robot ingataggá válik, egy infravörös érzékelő egy másik számítógépet bevonva felülbírálja az alap szint számításait és többszöri próbálgatással készteti a rendszert az új viszonyokhoz való alkalmazkodáshoz, mellyel a gép megtanulja hogyan birkózzon meg a számára ismeretlen tereppel is.
 Ez a szemlélet számítástechnikailag egyszerű és gyors a jelenleg alkalmazott, hasonló célt szolgáló módszerekhez képest. A Honda Asimoja például kénytelen folyamatosan elemezni és kiértékelni összes ízületének mozgását és szenzorainak adatait a következő lépés kiszámításához, ami egyrészt hatalmas számítási teljesítményt, ezáltal tekintélyes energiamennyiséget igényel, mozgása pedig korántsem olyan gyors és természetesnek tűnő, mint a más szemléletmóddal ellátott Runboté, melynek hierarchikus kontrollja elvileg megegyezik az emberek és az állatok számára a különböző felszíneken való viszonylag könnyű áthaladást biztosító módszerrel.
Ez a szemlélet számítástechnikailag egyszerű és gyors a jelenleg alkalmazott, hasonló célt szolgáló módszerekhez képest. A Honda Asimoja például kénytelen folyamatosan elemezni és kiértékelni összes ízületének mozgását és szenzorainak adatait a következő lépés kiszámításához, ami egyrészt hatalmas számítási teljesítményt, ezáltal tekintélyes energiamennyiséget igényel, mozgása pedig korántsem olyan gyors és természetesnek tűnő, mint a más szemléletmóddal ellátott Runboté, melynek hierarchikus kontrollja elvileg megegyezik az emberek és az állatok számára a különböző felszíneken való viszonylag könnyű áthaladást biztosító módszerrel.
A koncepció nem tekinthető a 21. század vívmányának, elsőként az 1930-as években vázolta fel egy orosz fiziológus, Nyikolaj Bernstein. Elmélete szerint az állatok esetében a mozgást nem kizárólag az agy kontrollálja. Lokalizált visszacsatolás alakul ki az izmok, az idegek és a gerincoszlop között, melyre az agy egy magasabb szintű ellenőrzéssel reagál. A Runbot mechanizmusa ennél azért lényegesen egyszerűbb és más mechanizmusok is fontos szerepet játszanak mozgása alakításában, ilyenek az ízületeknél elhelyezkedő periférikus érzékelők, valamint egy gyorsulásmérő, ami a gép bukdácsolását kíséri figyelemmel.
Wörgötter azonban hiszi, hogy robotja idővel egyre jobban tudja majd utánozni ezt a folyamatot, hiszen míg az ember képes a korábban megtanult kulcs mozdulatok felidézésére, a jelenlegi robotok csak igen korlátozottan adják vissza ezt, annak ellenére, hogy nincs semmi olyan alapvető ok, ami képtelenné tenné őket a paraméterek tartós eltárolására és előhívására.
A mindössze 23 centi magas Runbot gyakorlatilag alig több egy pár fémlábnál, felette csupán néhány áramkör és motorok helyezkednek el. A német Göttingen Egyetem Florentin Wörgötter által vezetett laboratóriumának szülöttje a leggyorsabb kétlábú robot titulusát birtokolja, egy rúdhoz erősítve masírozik, időnként botladozva egy pont körül. A legtöbb kétlábú robottal ellentétben egy rendkívül dinamikus szerkezetről van szó, ami könnyedén lépést tartana egy sietősen gyalogló emberrel.
Legutóbbi változata egy "hierarchikus vezérlő szerkezetnek" köszönhetően már képes megbirkózni a terep váratlan egyenetlenségeivel is. A hierarchikus szerkezet azt jelenti, hogy a terep nehézségi fokának megfelelő vezérlési szinteket hívhat segítségül a "futó" robot. A legalsó szint csupán egy alapvető kontrollt ad a robot sétáló mozgásának. Ilyenkor a rendszer adatokat gyűjt a mechanikus ízületekből, melyeket feldolgozva és parancsok formájában visszaküldve finomra hangolja, stabillá teszi a robot mozgását egy viszonylag egyenletes terepen. Amint a felszín egyenetlenebbé válik ez az alap szint már nem elegendő a Runbot egyensúlyának megtartásához, ezért a kutatók egy magasabb vezérlő mechanizmust is beléptettek a rendszerbe. Ha a robot ingataggá válik, egy infravörös érzékelő egy másik számítógépet bevonva felülbírálja az alap szint számításait és többszöri próbálgatással készteti a rendszert az új viszonyokhoz való alkalmazkodáshoz, mellyel a gép megtanulja hogyan birkózzon meg a számára ismeretlen tereppel is.
Ez a szemlélet számítástechnikailag egyszerű és gyors a jelenleg alkalmazott, hasonló célt szolgáló módszerekhez képest. A Honda Asimoja például kénytelen folyamatosan elemezni és kiértékelni összes ízületének mozgását és szenzorainak adatait a következő lépés kiszámításához, ami egyrészt hatalmas számítási teljesítményt, ezáltal tekintélyes energiamennyiséget igényel, mozgása pedig korántsem olyan gyors és természetesnek tűnő, mint a más szemléletmóddal ellátott Runboté, melynek hierarchikus kontrollja elvileg megegyezik az emberek és az állatok számára a különböző felszíneken való viszonylag könnyű áthaladást biztosító módszerrel.A koncepció nem tekinthető a 21. század vívmányának, elsőként az 1930-as években vázolta fel egy orosz fiziológus, Nyikolaj Bernstein. Elmélete szerint az állatok esetében a mozgást nem kizárólag az agy kontrollálja. Lokalizált visszacsatolás alakul ki az izmok, az idegek és a gerincoszlop között, melyre az agy egy magasabb szintű ellenőrzéssel reagál. A Runbot mechanizmusa ennél azért lényegesen egyszerűbb és más mechanizmusok is fontos szerepet játszanak mozgása alakításában, ilyenek az ízületeknél elhelyezkedő periférikus érzékelők, valamint egy gyorsulásmérő, ami a gép bukdácsolását kíséri figyelemmel.
Wörgötter azonban hiszi, hogy robotja idővel egyre jobban tudja majd utánozni ezt a folyamatot, hiszen míg az ember képes a korábban megtanult kulcs mozdulatok felidézésére, a jelenlegi robotok csak igen korlátozottan adják vissza ezt, annak ellenére, hogy nincs semmi olyan alapvető ok, ami képtelenné tenné őket a paraméterek tartós eltárolására és előhívására.