SG.hu·
Tapintáshoz juthatnak a robotok
Amerikai tudósok olyan szenzort fejlesztettek ki, ami szinte ugyanolyan érzékenységi fokkal "tapintja" a tárgyak anyagát, mint az emberi ujj.
A technika elvezethet akár egy emberivel egyenértékű robotkézhez is, alkotója mégis egy merőben más terület célzott meg, a sebészetet. Egy rákos daganatot eltávolító sebész számára az egyik legkényesebb döntés, hogy hol hagyja abba a vágást. Túl hamar nem szabad befejezni a műveletet, mert akkor rákos sejtek maradhatnak a páciens testében, túl nagy vágás esetében viszont az egészséges szervek szenvedhetnek sérüléseket. Ezt a döntést könnyíti meg hamarosan egy nagy felbontású tapintás érzékelő, amit a Nebraska-Lincoln Egyetem vegyészmérnökei fejlesztettek ki.
Ravi F. Saraf és tanítványa, Vivek Maheshwari
A jelenleg alkalmazott szenzorok fő problémája a felbontásból adódik, ami bár milliméterekben mérhető, meg sem közelíti az emberi ujj körülbelül 40 mikronos teljesítményét. Ez az eltérés alaposan rá is nyomja bélyegét a technikát alkalmazó eszközök hatékonyságára. Ravi F. Saraf professzor és Vivek Maheshwari munkája nyomán azonban úgy tűnik elérhető a 40 mikron, erről tanúskodik most közzétett tanulmányuk is. 40 mikron megközelítőleg egy hajszál átmérőjének a fele, ezért ehhez hasonló eredményhez mindenképpen nanoeszközökre volt szükség. Az így kapott mesterséges tapintásérzékelő a jelenleg alkalmazottaknál ötvenszer jobb.
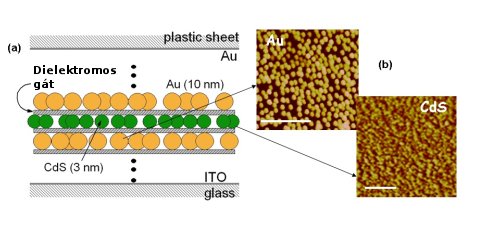
Az eszköz fém és félvezető nanorészecskék hártyavékony rétegeiből tevődik össze, melyeket elektródák vesznek körül. Amikor a hártya megérint egy felületet, minden nyomás vagy terhelés összenyomja a 10 nanométer átmérőjű arany nanorészecske, valamint 3 nanométer vastagságú kadmium-szulfid rétegeket, melyeket egy speciális polimerből kialakított dielektromos gátak választanak el egymástól. Az érintkezés hatására a hártya megváltozik és elektrolumineszcencia lép fel, azaz fény áramlik ki a részecskékből, amit egy kamera rögzít.
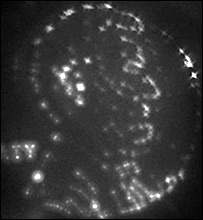 A technika demonstrálásaként egy ötcentesre nyomták rá a hártyát, ami - ahogy a képen is látszik - megmutatta Lincoln elnök arcképének és a "LIBERTY" felírat utolsó két betűjének lenyomatát, illetve kivehetők az elnök ruhájának redői is. Saraf professzor elmondása szerint a hártya elég erős és rugalmas ahhoz, hogy többször is felhasználják és nem utolsósorban olcsóbb is az előállítása, mint a jelenlegi érzékelőké. Úgy véli, szenzora alkalmazható lesz a robot technikában, hisz a robotok egyik leggyengébb pontja pontosan a tapintás. Ez jelentősen megkönnyítené a gépek érzékelési feladatait, mivel esetükben ez jelenleg főként a vizuális észlelésre korlátozódik, ami sokszor igen lelassítja a felismerés folyamatát.
A technika demonstrálásaként egy ötcentesre nyomták rá a hártyát, ami - ahogy a képen is látszik - megmutatta Lincoln elnök arcképének és a "LIBERTY" felírat utolsó két betűjének lenyomatát, illetve kivehetők az elnök ruhájának redői is. Saraf professzor elmondása szerint a hártya elég erős és rugalmas ahhoz, hogy többször is felhasználják és nem utolsósorban olcsóbb is az előállítása, mint a jelenlegi érzékelőké. Úgy véli, szenzora alkalmazható lesz a robot technikában, hisz a robotok egyik leggyengébb pontja pontosan a tapintás. Ez jelentősen megkönnyítené a gépek érzékelési feladatait, mivel esetükben ez jelenleg főként a vizuális észlelésre korlátozódik, ami sokszor igen lelassítja a felismerés folyamatát.
Kizárólag látva valamit minden irányból célszerű megszemlélni egy adott tárgyat a biztos eredmény érdekében, míg tapintással párosítva sokkal gyorsabb eredmény születhet. Kézbe véve például egy kockát, élei és sarkai kitapintásával azonnal egyértelművé válik miről is van szó. Saraf számára azonban az elsődleges alkalmazási terület a rák elleni küzdelem. Bizonyos esetekben a rákos szövetek keményebbek az egészségeseknél, így a szenzor segítségével elvileg egészen pontosan behatárolhatók.
A technika elvezethet akár egy emberivel egyenértékű robotkézhez is, alkotója mégis egy merőben más terület célzott meg, a sebészetet. Egy rákos daganatot eltávolító sebész számára az egyik legkényesebb döntés, hogy hol hagyja abba a vágást. Túl hamar nem szabad befejezni a műveletet, mert akkor rákos sejtek maradhatnak a páciens testében, túl nagy vágás esetében viszont az egészséges szervek szenvedhetnek sérüléseket. Ezt a döntést könnyíti meg hamarosan egy nagy felbontású tapintás érzékelő, amit a Nebraska-Lincoln Egyetem vegyészmérnökei fejlesztettek ki.
Ravi F. Saraf és tanítványa, Vivek Maheshwari
A jelenleg alkalmazott szenzorok fő problémája a felbontásból adódik, ami bár milliméterekben mérhető, meg sem közelíti az emberi ujj körülbelül 40 mikronos teljesítményét. Ez az eltérés alaposan rá is nyomja bélyegét a technikát alkalmazó eszközök hatékonyságára. Ravi F. Saraf professzor és Vivek Maheshwari munkája nyomán azonban úgy tűnik elérhető a 40 mikron, erről tanúskodik most közzétett tanulmányuk is. 40 mikron megközelítőleg egy hajszál átmérőjének a fele, ezért ehhez hasonló eredményhez mindenképpen nanoeszközökre volt szükség. Az így kapott mesterséges tapintásérzékelő a jelenleg alkalmazottaknál ötvenszer jobb.
Az eszköz fém és félvezető nanorészecskék hártyavékony rétegeiből tevődik össze, melyeket elektródák vesznek körül. Amikor a hártya megérint egy felületet, minden nyomás vagy terhelés összenyomja a 10 nanométer átmérőjű arany nanorészecske, valamint 3 nanométer vastagságú kadmium-szulfid rétegeket, melyeket egy speciális polimerből kialakított dielektromos gátak választanak el egymástól. Az érintkezés hatására a hártya megváltozik és elektrolumineszcencia lép fel, azaz fény áramlik ki a részecskékből, amit egy kamera rögzít.
A technika demonstrálásaként egy ötcentesre nyomták rá a hártyát, ami - ahogy a képen is látszik - megmutatta Lincoln elnök arcképének és a "LIBERTY" felírat utolsó két betűjének lenyomatát, illetve kivehetők az elnök ruhájának redői is. Saraf professzor elmondása szerint a hártya elég erős és rugalmas ahhoz, hogy többször is felhasználják és nem utolsósorban olcsóbb is az előállítása, mint a jelenlegi érzékelőké. Úgy véli, szenzora alkalmazható lesz a robot technikában, hisz a robotok egyik leggyengébb pontja pontosan a tapintás. Ez jelentősen megkönnyítené a gépek érzékelési feladatait, mivel esetükben ez jelenleg főként a vizuális észlelésre korlátozódik, ami sokszor igen lelassítja a felismerés folyamatát. Kizárólag látva valamit minden irányból célszerű megszemlélni egy adott tárgyat a biztos eredmény érdekében, míg tapintással párosítva sokkal gyorsabb eredmény születhet. Kézbe véve például egy kockát, élei és sarkai kitapintásával azonnal egyértelművé válik miről is van szó. Saraf számára azonban az elsődleges alkalmazási terület a rák elleni küzdelem. Bizonyos esetekben a rákos szövetek keményebbek az egészségeseknél, így a szenzor segítségével elvileg egészen pontosan behatárolhatók.