Berta Sándor
Robotokat tesztelnek az Etnánál

Az olaszországi vulkánon olyan körülmények uralkodnak, mint a Holdon vagy a Marson, ezért ideális tesztterepnek számít.
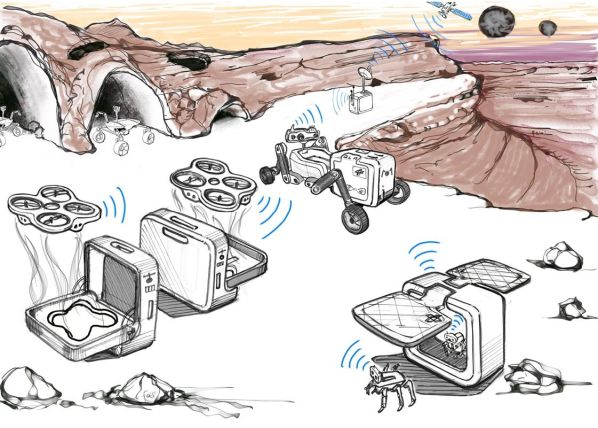
A Karlsruhei Technológiai Intézet (KIT), az Európai Űrügynökség (ESA), az Alfred Wegener Intézet - Helmholtz Sarki- és Tengeri Kutatási Központ, illetve a Kieli Óceánkutató Helmholtz Központjának tudósai az Autonomous Robotic Networks to Help Modern Societies - ARCHES nevű projekt keretében azt tesztelik, hogy az autonóm gépek összekapcsolhatók-e olyan módon, hogy közösen oldjanak meg nehéz feladatokat. A szakemberek az Etnát választották ki tesztterepnek, és olyan robotrajokat próbálnak ki ott, amelyekkel később más égitesteket szeretnének felfedezni.
A kutatók szerint ezek a gépcsapatok a jövőben az emberek "meghosszabbított karjaként" és "meghosszabbított szemeként" működnek majd. Az ARCHES célja, hogy robotcsapatokat állítson össze és koordináljon úgy, hogy azok önállóan tudjanak felszerelést felállítani vagy mintákat venni olyan ellenséges környezetben, mint a Mars vagy az óceánfenék. A gépeknek képesnek kell lenniük korábban ismeretlen tárgyak megragadására és manipulálására, a változó környezethez való alkalmazkodásra, s mindenekelőtt a csapaton belüli feladatok elosztására és koordinálására. A vulkanikus táj geológiai szempontból hasonlít a Holdon és a Marson uralkodó körülményekhez, ezért jól használható tesztkörnyezetnek. Az ARCHES-t a Német Repülési és Űrhajózási Központ (DLR) vezeti az és koordinálja a tesztküldetést is.
A KIT Vezérlőrendszerek Intézetében (IRS) a tudósok egy robotkart fejlesztettek ki haptikus ember-gép interfészként. Sean Kille, az IRS munkatársa szerint a megoldás segítségével az emberek és a gépek közösen vezethetnek egy felfedező robotot az Etna vulkáni mezeje felett. A különböző robotrajokat tervező algoritmusok segítségével kell koordinálni vagy ember által irányított közös felfedező küldetésre kell indulniuk. Kiemelt esemény lesz a GEO MISSION II a DLR Scout Roverrel, az Európai Űrügynökség (ESA) Interact Roverével és az interfészükkel közösen, amelyben a Hold felfedezését szimulálják. Ebben a küldetésben Thomas Reiter német űrhajós fogja irányítani az ESA járművét az Etnán a cataniai irányítóteremből. Egy másik küldetés során a KIT Antropomatikai és Robotikai Intézete által kifejlesztett humanoid kéz autonóm módon gyűjt majd kőzetmintákat (GEO MISSION I).
A Karlsruhei Technológiai Intézet (KIT), az Európai Űrügynökség (ESA), az Alfred Wegener Intézet - Helmholtz Sarki- és Tengeri Kutatási Központ, illetve a Kieli Óceánkutató Helmholtz Központjának tudósai az Autonomous Robotic Networks to Help Modern Societies - ARCHES nevű projekt keretében azt tesztelik, hogy az autonóm gépek összekapcsolhatók-e olyan módon, hogy közösen oldjanak meg nehéz feladatokat. A szakemberek az Etnát választották ki tesztterepnek, és olyan robotrajokat próbálnak ki ott, amelyekkel később más égitesteket szeretnének felfedezni.
A kutatók szerint ezek a gépcsapatok a jövőben az emberek "meghosszabbított karjaként" és "meghosszabbított szemeként" működnek majd. Az ARCHES célja, hogy robotcsapatokat állítson össze és koordináljon úgy, hogy azok önállóan tudjanak felszerelést felállítani vagy mintákat venni olyan ellenséges környezetben, mint a Mars vagy az óceánfenék. A gépeknek képesnek kell lenniük korábban ismeretlen tárgyak megragadására és manipulálására, a változó környezethez való alkalmazkodásra, s mindenekelőtt a csapaton belüli feladatok elosztására és koordinálására. A vulkanikus táj geológiai szempontból hasonlít a Holdon és a Marson uralkodó körülményekhez, ezért jól használható tesztkörnyezetnek. Az ARCHES-t a Német Repülési és Űrhajózási Központ (DLR) vezeti az és koordinálja a tesztküldetést is.
A KIT Vezérlőrendszerek Intézetében (IRS) a tudósok egy robotkart fejlesztettek ki haptikus ember-gép interfészként. Sean Kille, az IRS munkatársa szerint a megoldás segítségével az emberek és a gépek közösen vezethetnek egy felfedező robotot az Etna vulkáni mezeje felett. A különböző robotrajokat tervező algoritmusok segítségével kell koordinálni vagy ember által irányított közös felfedező küldetésre kell indulniuk. Kiemelt esemény lesz a GEO MISSION II a DLR Scout Roverrel, az Európai Űrügynökség (ESA) Interact Roverével és az interfészükkel közösen, amelyben a Hold felfedezését szimulálják. Ebben a küldetésben Thomas Reiter német űrhajós fogja irányítani az ESA járművét az Etnán a cataniai irányítóteremből. Egy másik küldetés során a KIT Antropomatikai és Robotikai Intézete által kifejlesztett humanoid kéz autonóm módon gyűjt majd kőzetmintákat (GEO MISSION I).