MTI
Gömbön egyensúlyozó robot
Az egyensúlyozó robot feltalálója, Ralph Hollis szerint emberi környezetben nagyon alkalmatlan egy sok keréken guruló robot, s ha már csökkenteni kell a kerekek számát, érdemes elmenni az elméletileg lehetséges minimumig, egyetlen kerékig, pontosabban szólva gömbig.
A pittsburgh-i Carnegie Mellon egyetem kutatójának karcsú és magas robotja egy focilabda méretű fémgömbön egyensúlyozva mozog. A robot, amely - a labdát és a robotot jelentő angol szavak egy-egy szótagjából kialakított - Balbot nevet kapta, henger alakú, 1,5 m magas, testében 48 voltos telepet, számítógépet és szervomotorokat hordoz, s két pár görgőjével egy alumíniumból készült labdára támaszkodik, amelyet a jobb tapadás érdekében műanyaggal vontak be.
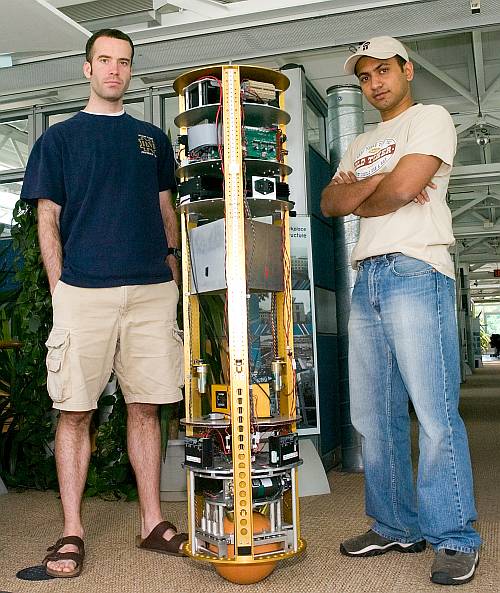
Balbot a dinamikus stabilitás bajnoka: ez azt jelenti, hogy az emberhez hasonlóan a robotnak állandóan apró mozgásokra van szüksége ahhoz, hogy állva maradjon. Egyensúlyérzékelőkkel látták el, s vezérlő számítógépe a fém labdát mindig a szerkezet súlypontja alá gurítja. Ha meglökik, kicsit mozdít a labdáján és visszanyeri egyensúlyát.
Balbot szükség esetén bármilyen irányba tud haladni. Feltalálója azonban előbb-utóbb kezekkel is el akarja látni robotját, hogy egyszerűbb feladatokra, például szállításra használni lehessen. Csapata már dolgozik a bonyolult vezérlő algoritmusokon, amivel egy karjait mozgató robotot is egyensúlyban lehet tartani - adta hírül a The New Scientist című angol tudományos folyóirat online kiadásában.
Kapcsolódó letöltések
Videó #1 - a robot meglökése
Videó #2 - pontról pontra mozgás
A pittsburgh-i Carnegie Mellon egyetem kutatójának karcsú és magas robotja egy focilabda méretű fémgömbön egyensúlyozva mozog. A robot, amely - a labdát és a robotot jelentő angol szavak egy-egy szótagjából kialakított - Balbot nevet kapta, henger alakú, 1,5 m magas, testében 48 voltos telepet, számítógépet és szervomotorokat hordoz, s két pár görgőjével egy alumíniumból készült labdára támaszkodik, amelyet a jobb tapadás érdekében műanyaggal vontak be.
Balbot a dinamikus stabilitás bajnoka: ez azt jelenti, hogy az emberhez hasonlóan a robotnak állandóan apró mozgásokra van szüksége ahhoz, hogy állva maradjon. Egyensúlyérzékelőkkel látták el, s vezérlő számítógépe a fém labdát mindig a szerkezet súlypontja alá gurítja. Ha meglökik, kicsit mozdít a labdáján és visszanyeri egyensúlyát.
Balbot szükség esetén bármilyen irányba tud haladni. Feltalálója azonban előbb-utóbb kezekkel is el akarja látni robotját, hogy egyszerűbb feladatokra, például szállításra használni lehessen. Csapata már dolgozik a bonyolult vezérlő algoritmusokon, amivel egy karjait mozgató robotot is egyensúlyban lehet tartani - adta hírül a The New Scientist című angol tudományos folyóirat online kiadásában.
Kapcsolódó letöltések



